康谋产品 | 用于ADAS和AD传感器的独立数据采集设备
在ADAS/AD环境中,需要使用测量数据转换器,来将原始数据与摄像头、雷达或激光雷达等传感器分离。MDILink能够将传感器数据转换为10Gibt/s以太网数据,实现原始数据直接转发到ECU,助力开发阶段和验证结果到批量生产的顺利过渡。
文章导读:在ADAS/AD环境中,需要使用测量数据转换器,来将原始数据与摄像头、雷达或激光雷达等传感器分离。
MDILink能够将传感器数据转换为10 Gibt/s以太网数据,实现原始数据直接转发到ECU,助力开发阶段和验证结果到批量生产的顺利过渡。
目录
在 ADAS/AD 环境中,如果想要将原始数据与摄像头、雷达或激光雷达等传感器分离,总是会使用测量数据转换器。借助MDILink,您可以获得一个SerDes测量数据转换器,从开发阶段和验证结果顺利过渡到批量生产。
一、MDILink主要功能
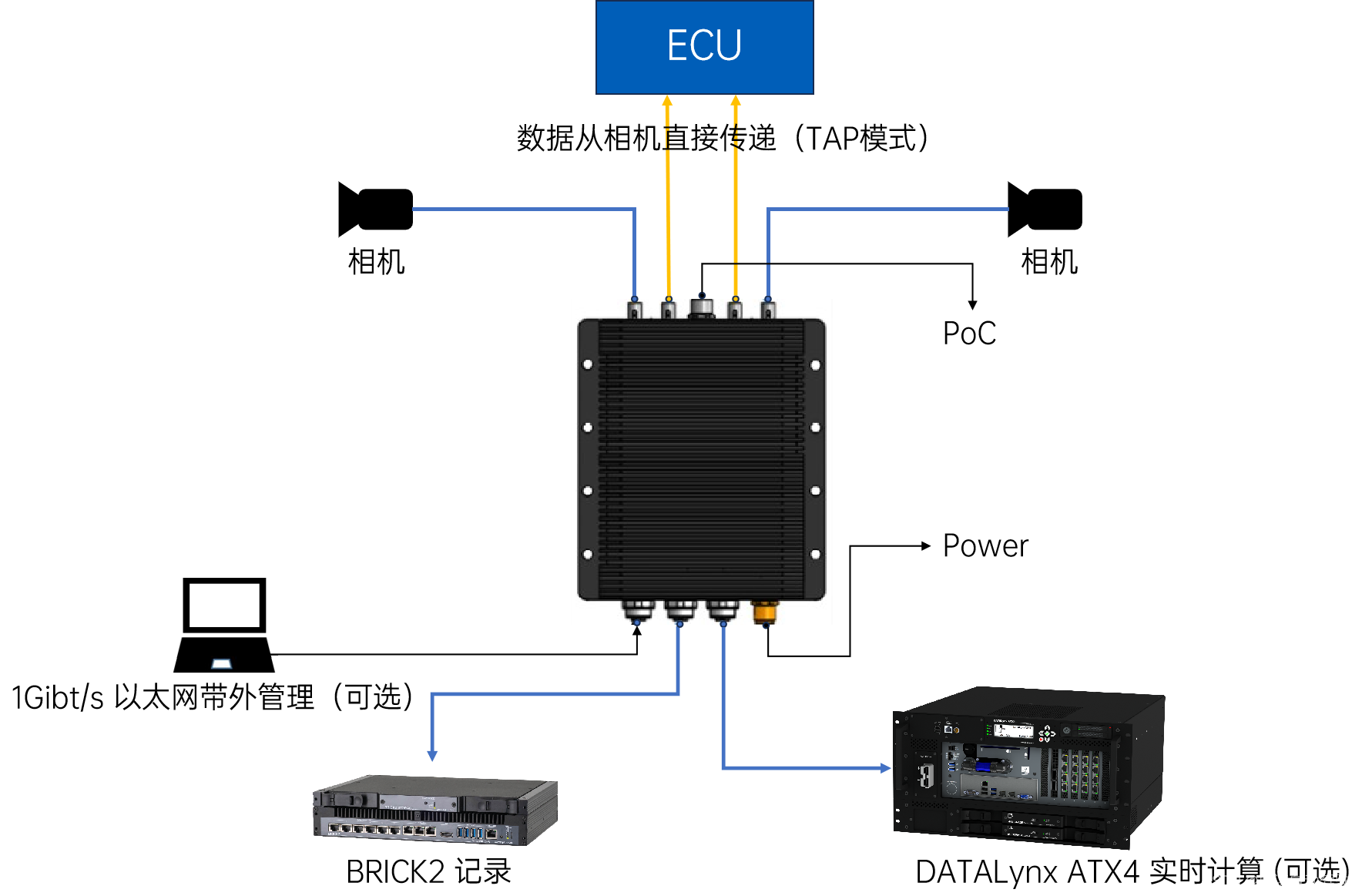
MDILink能够适配多种不同接口的传感器,包括GMSL2、FPDLinkⅢ等,同时,MDILink具备的TAP模式能够使其作为中间设备,将传感器数据转换为10 Gibt/s 以太网数据的同时,也能实现原始数据直接转发到ECU。
MDILink具备两个10GbE接口,可将传感器数据通过这两个接口发送至最多两个独立系统。搭载的Zynq©SoC使MDILink能够无需外部依赖实现独立运行。额外的1Gbit/s以太网端口解决配置和管理问题,该端口独立于数据传输接口运作。
二、数据传输方式
1. 数据包发送方式
默认采用4个UDP端口进行传输。
2. 自定义分段机制
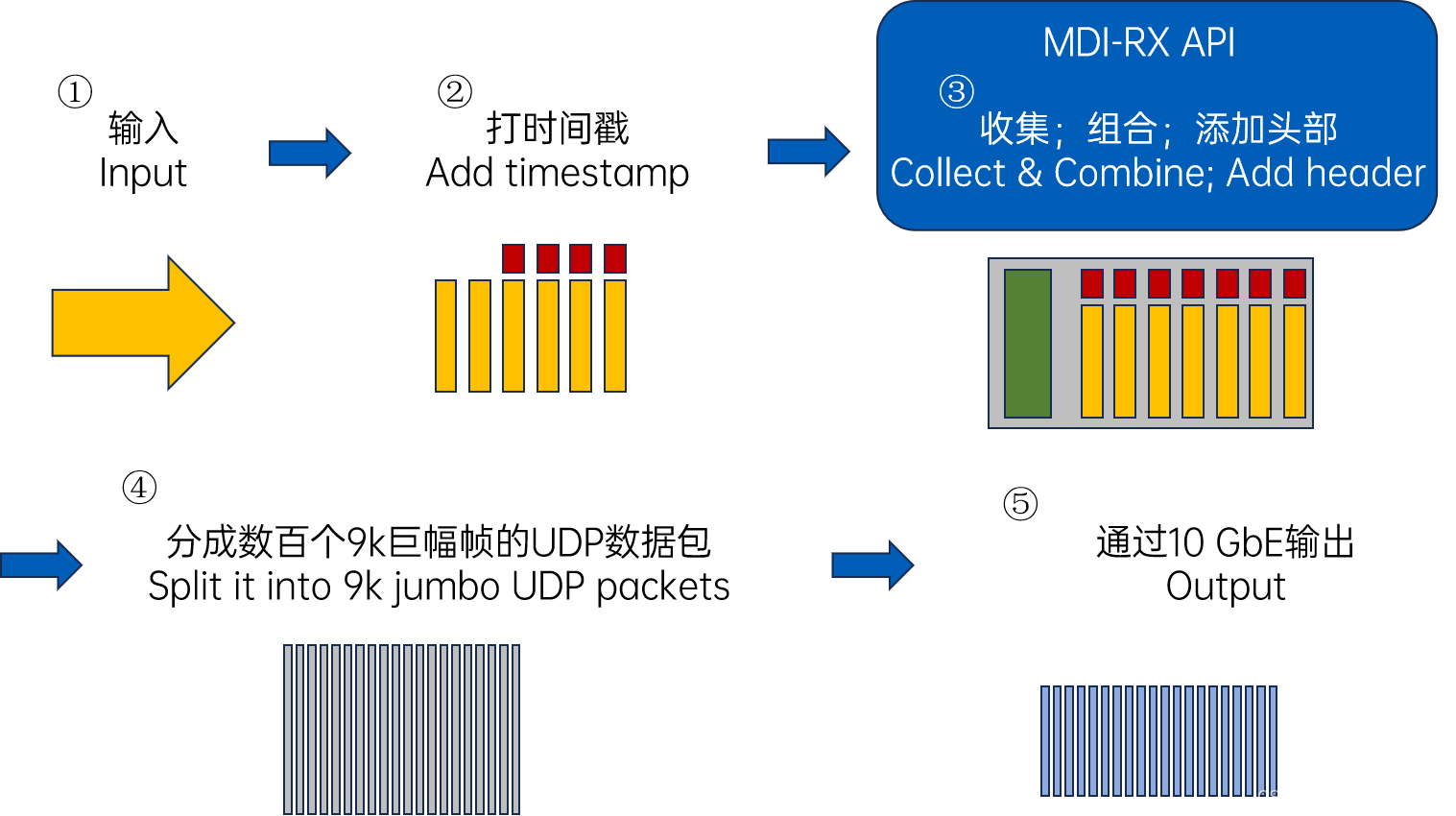
由于标准IPv4的分段机制不适用于MDILink的使用场景,因此MDILink的10 GbE以太网端口采用自定义分段机制来发送数据,即在每个9k的巨幅帧中添加一个传输头。
3. 接收缓冲区
在常规的RAM中设置用于接收数据缓冲区的数量,用于防止数据包丢失并提升数据处理速度。
4. 中断调节
只有在较大数量的数据包在传输时才触发一次中断,能够有效减少系统负载从而避免数据丢失。
5. 接收端扩展
通过IP地址和端口信息计算Hash值,将接收到的数据包分配到多个CPU核心上处理,同样能够避免单核计算引起系统负载。
6. MDI-RX API
-
用于所有MDI设备的高性能数据接收API(支持Win和Linux)
-
收集MDILink发送的单个UDP数据包,组合返回API用户的AVETO帧
-
如果发生UDP数据包丢失,AVETO帧要么丢弃,要么标记为损坏,取决于API的设置
-
此API仅传递完整帧,不解释AVETO头或其他头部信息,这些信息由API应用完成
-
返回统计信息,比如接受的帧数;内存使用情况等
三、时间同步

MDILink能够通过10GbE以太网端口接收802.1AS、802.1AS-Avnu(需要定制)、1588v2-P2P-UDP和1588v2-E2E-UDP的时间同步信号,这些时间同步信号可由以下设备提供:
-
虹科BRICKplus和BRICK2
-
带有QX550扩展的虹科DATALynx ATX4
-
支持以上时间同步协议的网络交换机和大师时钟(Grandmaster clock)设备
MDILink能够实现在微妙级别以下的精度设置时间戳,例如,在4个MDILink,两个BRICK2和8个相机的方案中,时间同步误差主要在100-200纳秒之间,这包括了由相机本身和相机与MDILink之间传输产生的误差。
四、总结
MDILink 位于传感器端,可实现从串行链路/LVDS摄像机接口(如FPD-LINK)无损解耦合原始数据和时间戳。
如您对上述产品和解决方案感兴趣,
欢迎联系康谋自动驾驶团队了解更多信息。
我们将竭诚为您服务!
期待与您的交流!
 https://keymotek.com/
https://keymotek.com/
魔乐社区(Modelers.cn) 是一个中立、公益的人工智能社区,提供人工智能工具、模型、数据的托管、展示与应用协同服务,为人工智能开发及爱好者搭建开放的学习交流平台。社区通过理事会方式运作,由全产业链共同建设、共同运营、共同享有,推动国产AI生态繁荣发展。
更多推荐



 21
21 0
0- 0



 已为社区贡献5条内容
已为社区贡献5条内容

所有评论(0)