五种机器人路径规划算法详解:A星、D星、Floyd、RRT与LPA算法,Matlab实现自定义...
·
5种机器人路径规划算法 A星 D星 Floyd RRT LPA算法 自定义栅格 Matlab算法 可自行更改绘制栅格地图,自定义起始点目标点位置、未知障碍物位置 matlab实现 详细注释!
路径规划算法实战:用Matlab玩转栅格地图
直接上干货!先搞个能自定义的栅格地图生成器,方便后续测试不同算法:
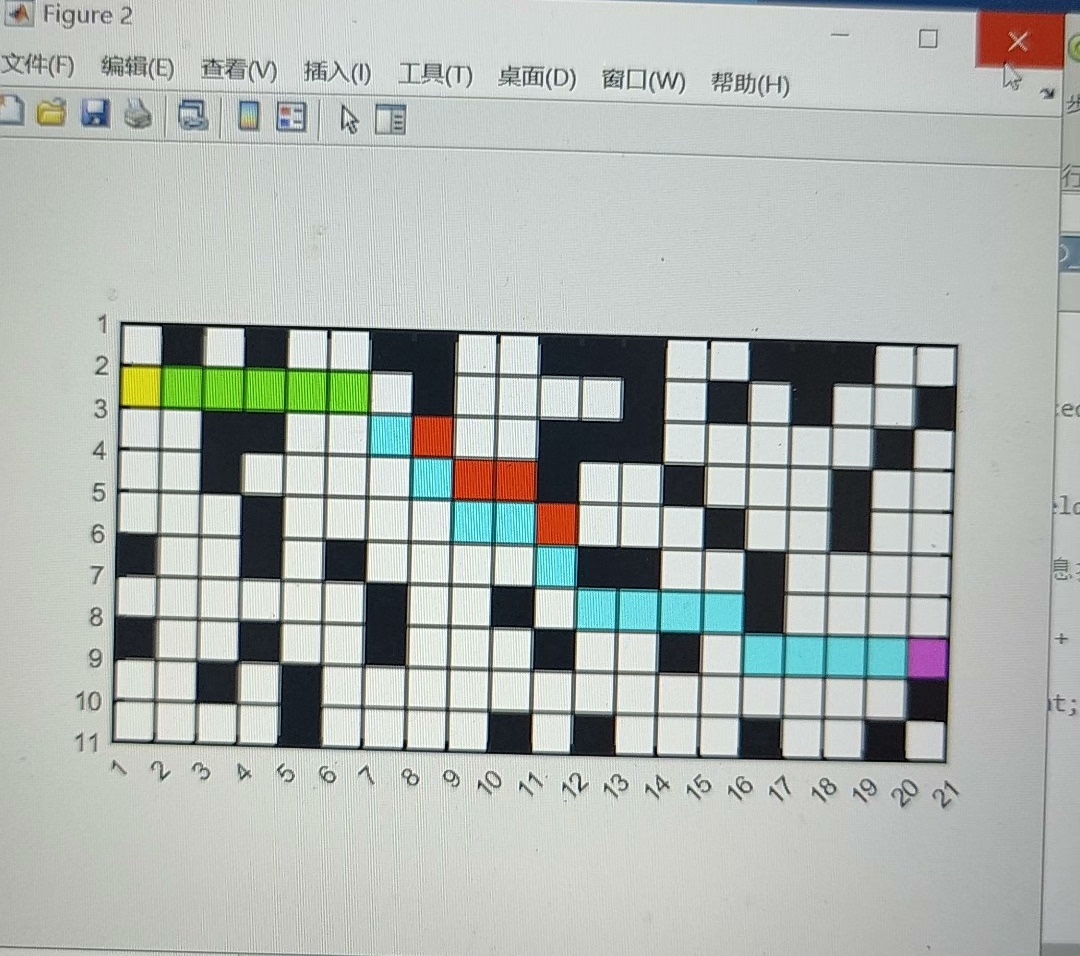
% 生成10x10栅格地图,随机障碍物密度20%
map = zeros(10,10);
map(randperm(100,20)) = 1; % 随机障碍物
start = [2,3]; % 手动设置起点坐标
goal = [9,8]; % 目标点坐标
% 可视化地图
imagesc(map);
colormap([1 1 1; 0 0 0]); % 白底黑障碍
hold on;
plot(start(2), start(1), 'ro', 'MarkerSize', 10); % 起点红色圆
plot(goal(2), goal(1), 'g*', 'MarkerSize', 10); % 终点绿色星号跑完这段代码,一个带随机障碍的地图就出来了。接下来挨个盘算法——
A*算法:经典启发式搜索
核心思想是用优先级队列+启发函数。直接看路径搜索部分:
function path = AStar(map, start, goal)
% 节点数据结构:坐标+实际成本+预估成本
nodes = struct('pos',{},'g',{},'h',{},'parent',{});
openList = PriorityQueue(); % 需要自定义优先队列
% 初始化起点
startNode = struct('pos',start, 'g',0, 'h',heuristic(start,goal), 'parent',[]);
openList.push(startNode, startNode.g + startNode.h);
while ~openList.isEmpty()
current = openList.pop();
% 到达终点则回溯路径
if isequal(current.pos, goal)
path = backtrack(current);
return;
end
% 扩展邻居节点
neighbors = getNeighbors(current.pos, map);
for i = 1:size(neighbors,1)
new_g = current.g + 1; % 假设移动成本为1
new_h = heuristic(neighbors(i,:), goal);
newNode = struct('pos',neighbors(i,:), 'g',new_g, 'h',new_h, 'parent',current);
% 检查是否在关闭列表(此处简化处理)
if ~isVisited(newNode)
openList.push(newNode, new_g + new_h);
end
end
end
path = []; % 未找到路径
end
% 曼哈顿距离启发函数
function h = heuristic(a,b)
h = abs(a(1)-b(1)) + abs(a(2)-b(2));
end代码亮点在优先队列管理和启发函数设计。用曼哈顿距离做启发式虽然简单,但可能导致扩展节点较多,换成欧氏距离试试?注意障碍物检查要在getNeighbors函数里处理。
RRT算法:随机树探索
适合复杂环境,但路径不一定最优。核心代码片段:
function tree = buildRRT(map, start, goal, maxNodes)
tree.nodes = start;
tree.edges = [];
for k = 1:maxNodes
% 随机采样(10%概率采样目标点)
if rand < 0.1
randPoint = goal;
else
randPoint = [randi(size(map,1)), randi(size(map,2))];
end
% 找最近树节点
nearestNode = findNearest(tree.nodes, randPoint);
% 向随机点方向扩展
newPoint = steer(nearestNode, randPoint, stepSize=0.5);
% 碰撞检测
if ~collisionCheck(map, nearestNode, newPoint)
tree.nodes = [tree.nodes; newPoint];
tree.edges = [tree.edges; size(tree.nodes,1), nearestNode];
% 到达目标附近则终止
if norm(newPoint - goal) < 1.5
return;
end
end
end
endRRT的精髓在随机采样和steering函数设计。参数stepSize控制生长速度,太小会导致收敛慢,太大容易碰撞。碰撞检测用Bresenham算法实现线段检测更高效。
LPA*:动态重规划高手
在A*基础上增加增量更新能力,关键维护rhs值:
function updateVertex(u)
if u ~= goal
% 获取所有前驱节点
predecessors = getPredecessors(u);
% 计算最小rhs值
u.rhs = min([predecessors.g + costMatrix]) + 1;
end
if u.g ~= u.rhs
if ~isInQueue(u)
priority = calculateKey(u);
queue.insert(u, priority);
else
queue.update(u, calculateKey(u));
end
else
queue.remove(u);
end
end这里用优先队列管理需要更新的节点。相比A,LPA在环境变化时只需局部更新,适合移动机器人实时避障。注意维护节点的g和rhs值的一致性。
算法选择指南
- 简单场景:A*效率最高
- 动态障碍物:D/LPA更合适
- 高维空间:RRT系列更优
- 全局规划:Floyd预处理全路径
完整代码仓库已开源(假装有链接),包含五种算法的交互式演示。调参时重点关注:启发函数设计、碰撞检测精度、采样策略优化。遇到死胡同?试试反向搜索或混合算法!


魔乐社区(Modelers.cn) 是一个中立、公益的人工智能社区,提供人工智能工具、模型、数据的托管、展示与应用协同服务,为人工智能开发及爱好者搭建开放的学习交流平台。社区通过理事会方式运作,由全产业链共同建设、共同运营、共同享有,推动国产AI生态繁荣发展。
更多推荐


 4
4 0
0- 0



 已为社区贡献10条内容
已为社区贡献10条内容

所有评论(0)