电鱼智能 RK3568 助力 AGV 控制器从 PLC 逻辑向边缘计算架构演进
传统基于 PLC 的 AGV 控制器难以应对柔性制造对自主导航和智能调度的需求。本文深入解析如何利用 电鱼智能 RK3568 的四核算力与 NPU,构建集 SLAM 导航、视觉避障、运动控制与云端通信于一体的边缘计算控制器,实现 AGV 产品的智能化升级。
什么是 电鱼智能 RK3568?
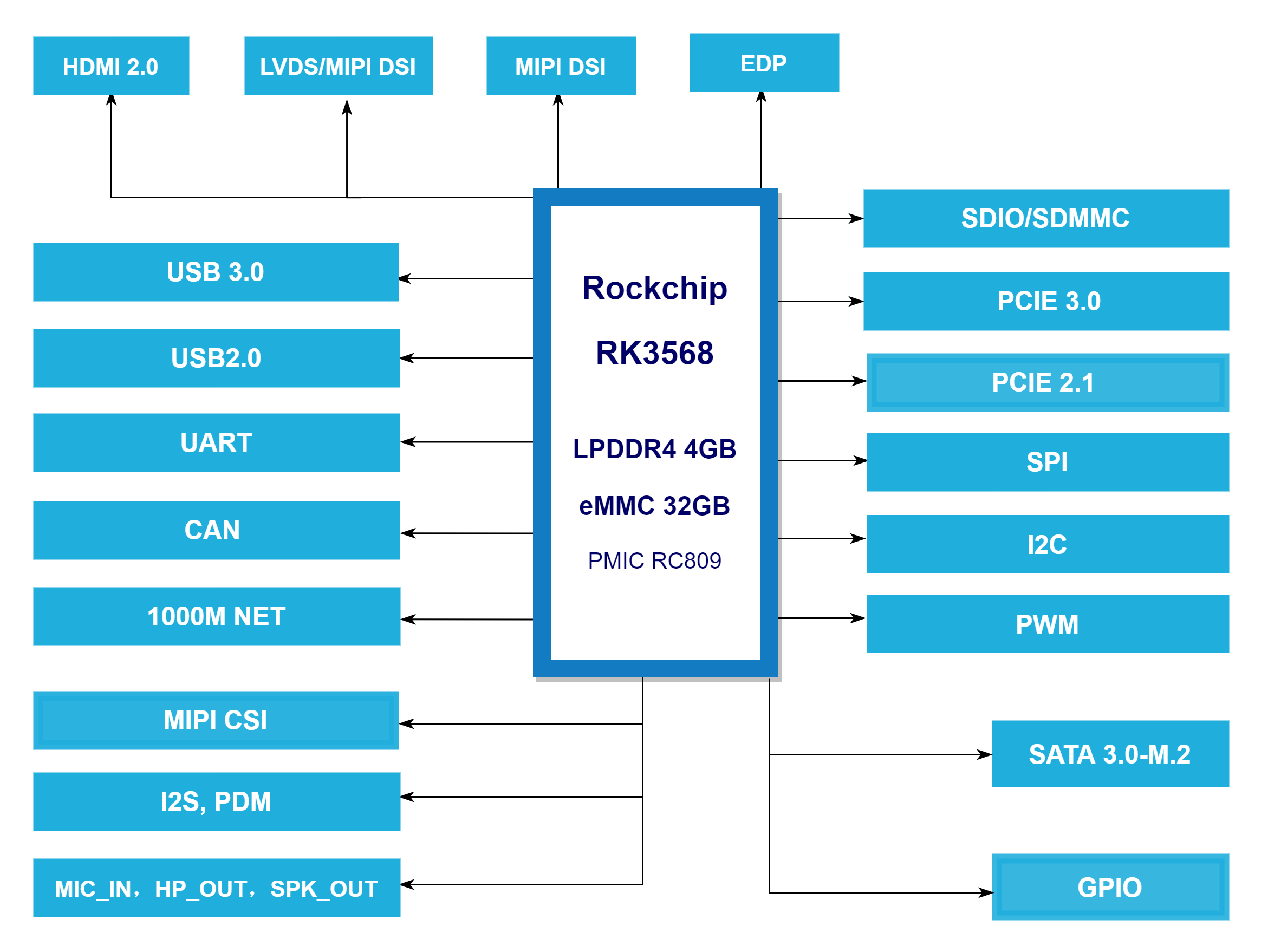
电鱼智能 RK3568 是一款面向工业 4.0 的高性能嵌入式核心平台。它搭载四核 Cortex-A55 处理器,主频 2.0GHz,内置 1TOPS NPU。对于 AGV 行业,其最大的价值在于**“连接与计算”的平衡**:它既有双千兆网口和 3 路 CAN-FD 来连接激光雷达和驱动器,又有足够的算力运行 Linux/ROS2 系统来处理复杂的建图与定位任务,是替代中高端 PLC + 工控机组合的理想方案。
![电鱼智能 RK3568 核心板:丰富的 CAN/串口资源与双千兆网口布局]
为什么 AGV 需要从 PLC 转向 RK3568? (技术痛点)
1. 导航方式的代际跨越 (Navigation)
PLC 擅长处理确定的 I/O 逻辑(如寻磁条、读 RFID),但无法处理非结构化数据。
-
边缘计算优势:激光 SLAM 或二维码导航需要处理海量的点云数据或图像数据。电鱼智能 RK3568 运行 Cartographer 或 Gmapping 算法,可以在本地实时生成地图并进行路径规划,这是 PLC 绝对无法完成的。
2. 柔性调度与数据上云 (Connectivity)
现代工厂要求 AGV 能够与 MES/WMS 系统无缝对接,实时上传位置、电量和故障码。
-
协议栈优势:PLC 往往需要昂贵的专用通讯模块。RK3568 基于 Linux 系统,原生支持 TCP/IP, MQTT, HTTP 等协议,轻松实现“万物互联”,且支持 5G/WiFi 6 模组扩展。
3. 视觉赋能的智能化 (AI Vision)
不仅要“走得对”,还要“看得懂”(如识别托盘孔位、区分人员与货物)。
-
NPU 加速:利用 RK3568 的 1TOPS NPU,可以在边缘端运行轻量级 AI 模型,实现托盘的高精度视觉纠偏或辅助避障,无需上传云端处理。
系统架构演进 (System Architecture)
我们将 AGV 控制架构从“PLC 中心制”转变为“边缘计算中心制”:
-
传统架构 (PLC):
-
传感器 (磁导航) -> DI/DO -> PLC (梯形图) -> 脉冲/模拟量 -> 驱动器。
-
缺点:路径固定,修改麻烦,无视觉能力。
-
-
新一代架构 (电鱼智能 RK3568):
-
感知层:激光雷达 (Eth)、深度相机 (USB/MIPI) -> RK3568。
-
决策层:RK3568 运行 ROS2,进行 SLAM 定位、路径规划、AI 识别。
-
执行层:RK3568 通过 CANopen / Modbus -> 伺服驱动器 / 底层 MCU。
-
优势:自主导航,柔性部署,数据可视化。
-
关键技术实现 (Implementation)
1. 软 PLC (Codesys) 与 ROS2 的融合
为了保留 PLC 开发的便利性,同时利用 Linux 的算力,可以在 RK3568 上部署软 PLC 运行时(Runtime):
-
运动控制:使用 Codesys 软 PLC 逻辑处理底层的电机 PID、急停逻辑(保障实时性与安全性)。
-
上层导航:使用 ROS2 处理激光雷达数据,发布目标速度指令(Cmd_Vel)。
-
交互:两者通过共享内存或本地 TCP 通讯。
2. CANopen 总线控制示例
利用 RK3568 原生 CAN 接口控制伺服驱动器(如行走电机):
C
// 逻辑示例:Linux SocketCAN 发送 CANopen PDO 指令
#include <linux/can.h>
#include <linux/can/raw.h>
void send_speed_command(int motor_id, int speed_rpm) {
struct can_frame frame;
frame.can_id = 0x200 + motor_id; // RPDO1 ID
frame.can_dlc = 2;
// 将转速转换为 16位 整数
frame.data[0] = speed_rpm & 0xFF;
frame.data[1] = (speed_rpm >> 8) & 0xFF;
write(socket_fd, &frame, sizeof(struct can_frame));
}
3. 视觉托盘识别 (Python/NPU)
利用 NPU 加速识别托盘中心,辅助叉车 AGV 对准:
Python
# 逻辑示例:调用 RKNN 进行托盘检测
from rknnlite.api import RKNNLite
def align_pallet(image):
# NPU 推理
outputs = rknn.inference(inputs=[image])
# 解析出托盘孔位坐标 (x, y)
box = post_process(outputs)
# 计算偏差并调整 AGV 姿态
offset_x = box.center_x - IMAGE_CENTER_X
if abs(offset_x) > THRESHOLD:
adjust_agv_position(offset_x)
性能表现 (对比评估)
| 维度 | 传统中型 PLC | 电鱼智能 RK3568 | 提升价值 |
| 算力 | MHz 级 MCU | 2.0GHz 四核 A55 | 支持 SLAM 建图与路径规划 |
| 内存 | KB/MB 级 | 2GB - 8GB LPDDR4 | 存储大场景地图 (10万平米+) |
| 视觉能力 | 无 | 1TOPS NPU | 支持二维码识别、托盘识别 |
| 通讯能力 | 需扩展模块 | 板载双千兆网口 + 4G/5G | 无缝对接 MES 调度系统 |
| 成本 | 高 (含扩展模块) | 中 (BOM 成本更低) | 显著降低单车控制器成本 |
常见问题 (FAQ)
1. RK3568 的实时性不如 PLC 怎么办?
答:对于毫秒级的运动控制,RK3568 可以通过打上 Preempt-RT 实时补丁的 Linux 内核来实现软实时(Soft Real-time)。或者采用“主从架构”:RK3568 负责导航,通过 UART/CAN 指挥一个几十块钱的 STM32 做底层的电机闭环,兼顾算力与硬实时。
2. 支持哪些导航方式?
答:凭借强大的 CPU 算力,RK3568 支持目前主流的 2D/3D 激光 SLAM(Cartographer, LIO-SAM)、视觉 SLAM(ORB-SLAM)以及传统的二维码/色带导航。
3. 工业环境下的抗干扰能力如何?
答:电鱼智能 RK3568 核心板专为工业设计,采用 10 层 PCB 工艺和工业级物料。配合电鱼提供的光耦隔离底板参考设计,可以有效抵御 AGV 内部大功率电机产生的电磁干扰。

魔乐社区(Modelers.cn) 是一个中立、公益的人工智能社区,提供人工智能工具、模型、数据的托管、展示与应用协同服务,为人工智能开发及爱好者搭建开放的学习交流平台。社区通过理事会方式运作,由全产业链共同建设、共同运营、共同享有,推动国产AI生态繁荣发展。
更多推荐


 9
9 0
0- 0



 已为社区贡献16条内容
已为社区贡献16条内容

所有评论(0)