世界坐标系到观察坐标系的变换步骤_《3D数学基础》提炼总结(九)矩阵和线性变换...
一、变换物体与变换坐标系在讨论变换前,必须要搞清楚到底要变换什么。考虑2D中的例子“将以物体顺时针旋转20度”。变换物体(本例中为旋转),以为这旋转物体上所有的点,这些点将被移动到一个新的位置。我们使用同一坐标系来描述变换前和变换后点的位置。现在,和变换坐标系的概念进行比较。旋转坐标系时,物体上的点实际没有移动,我们只是在另一个坐标系中描述它的位置而已。我们将证明这两...
一、变换物体与变换坐标系
在讨论变换前,必须要搞清楚到底要变换什么。
考虑2D中的例子“将以物体顺时针旋转20度”。变换物体(本例中为旋转),以为这旋转物体上所有的点,这些点将被移动到一个新的位置。我们使用同一坐标系来描述变换前和变换后点的位置。
现在,和变换坐标系的概念进行比较。旋转坐标系时,物体上的点实际没有移动,我们只是在另一个坐标系中描述它的位置而已。
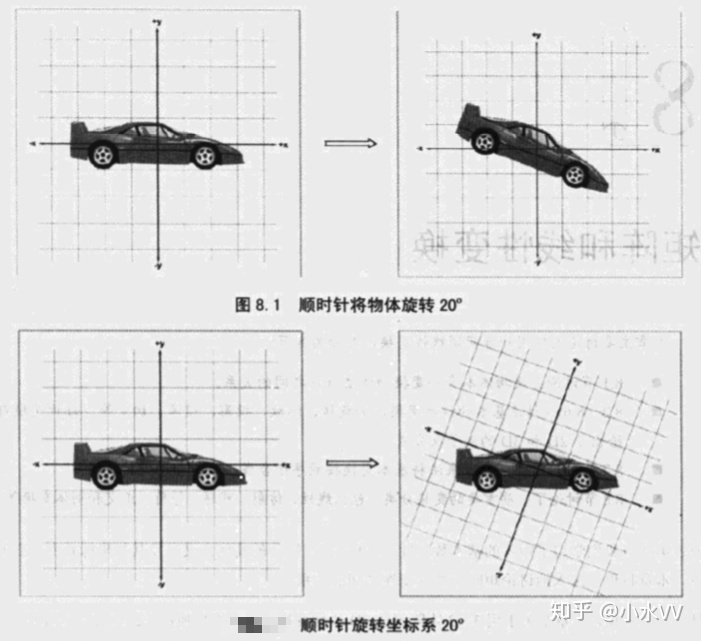
我们将证明这两种变换在某种意义上是等价的,但现在,先看看它们各自的优点
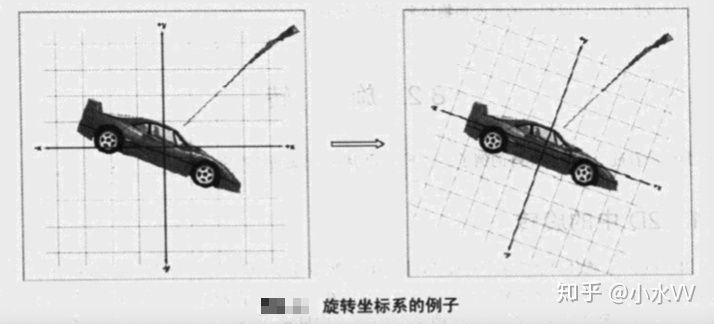
变换物体的用处非常明显。例如,为了渲染一辆车,必须将点从车的物体坐标系变换到世界坐标系,接着到摄像机坐标系。那么为什么还要变换坐标系呢?乍看起来,把坐标系旋转到这个奇怪的位置似乎并没有什么价值。观察下图就可以发现,其实旋转坐标系就能起到很好的作用。
下图展示了一把步枪,正在向汽车发射子弹,如左边的图所示,我们一开始就知道世界坐标系中枪的位置和子弹的弹道。现在,想象一下世界坐标系被旋转到和车的物体坐标系重合的位置,而与此同时保持车、枪、子弹弹道不动。这样,我们得到了枪和子弹弹道在车的物体坐标系中的坐标,接着可以作碰撞检测以检查子弹是否会击中汽车了。
当然,也可以将车旋转到世界坐标系,在世界坐标系中作碰撞检测,但这要花费更多的时间,因为车的模型可能有大量的顶点和三角形,计算量太大。现在,不必担心实际变换的细节问题,这正是本章的剩余部分要对付的。只需记住可以变换问题,也可以变换坐标系。某些情况下一种方法比另一种更合适。
对于两种变换保持一种概念上的区别还是有必要的,有些情况下需要进行物体变换,另外一些情况下则需要进行坐标系变换。然而,这种变换实际上是等价的,将物体变换一个量等价于将坐标系变换一个相反的量。
二、旋转
1.2D中的旋转
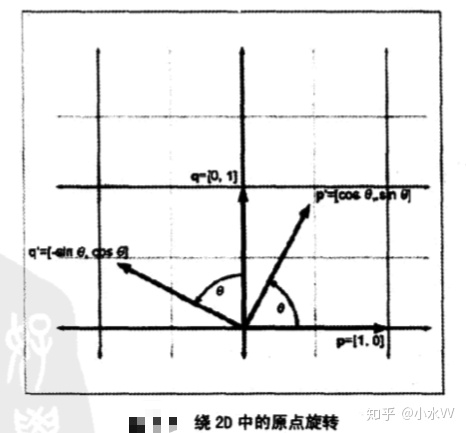
在2D环境中,物体只能绕某个点旋转,因为现在暂不考虑平移,这里我们进一步限制物体,使其只绕原点旋转。2D中绕原点的旋转只有一个参数:角度

,它描述了旋转量。逆时针旋转经常(不是必须)被认为是正方向,顺时针方向是负方向。下图展示了基向量 p,q绕原点旋转,得到新的基向量

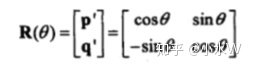
现在我们知道了旋转后基向量的值,就可以以公式的形式构造矩阵如下。
2.3D中绕坐标轴的旋转
在3D场景中,绕轴旋转而不是点(此时,轴指的是旋转所绕的直线,不一定是笛卡尔坐标轴x,y或z).再次声明,这里暂不考虑平移,所以只讨论旋转轴穿过原点的情况。
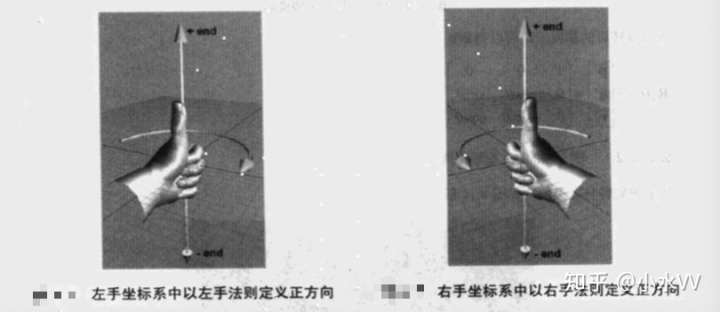
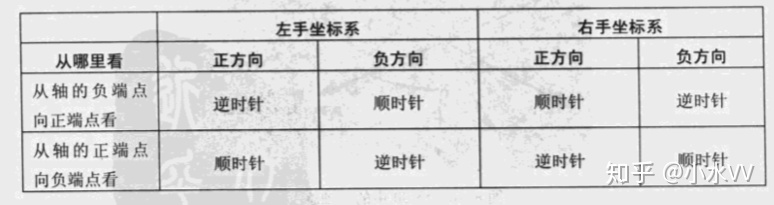
绕轴旋转

时,必须知道哪个方向被认为“正”,哪个方向被认为“负”,左手坐标系中定义此方向的规则为左手法则。首先,要明确旋转轴指向哪个方向。当然,旋转轴在理论上是无限延伸的,但我们还是要认为它有正端点和负端点。与笛卡尔坐标轴定义坐标系相同,左手法则是这样的:伸出左手,大拇指向上,其余四指弯曲。大拇指指向旋转轴的正方向,此时,四指弯曲的方向就是旋转的正方向。此时,四指弯曲的方向就是旋转的正方向,此时,四指弯曲的方向就是旋转的正方向。如下图所示。
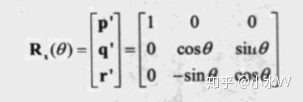
最为常见的旋转是绕某坐标轴的简单旋转。让我们从绕x 轴旋转开始。
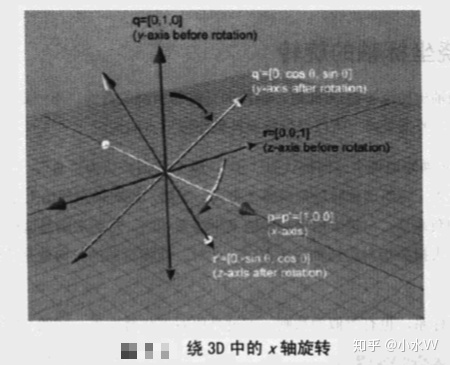
求出旋转后的基向量,可以得到矩阵。
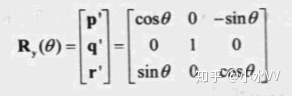
与绕y轴的3D旋转与之类似,如图
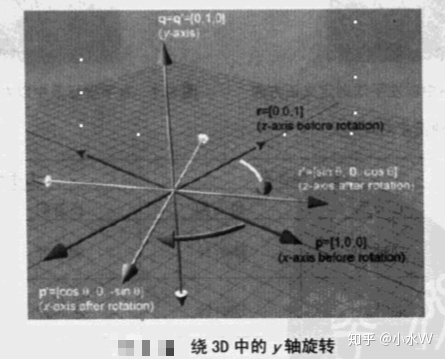
可得绕y轴旋转的矩阵。
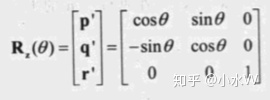
最后是绕z轴的旋转如公式所示
3.3D中绕坐标轴的旋转
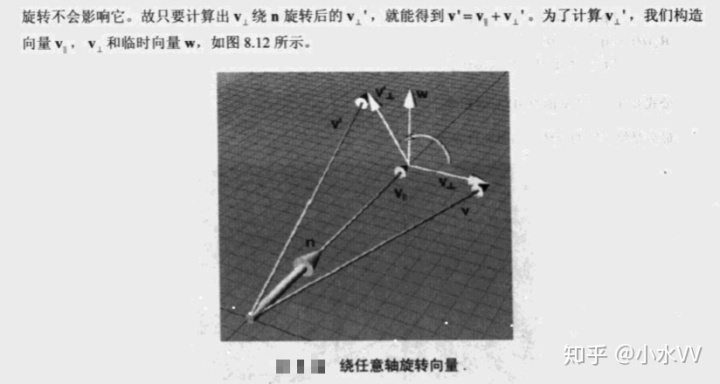
当然也能绕3D中的任意轴旋转。因为这里不考虑平移,可以假设旋转轴通过原点。这种旋转比绕坐标轴的旋转更复杂也更少见。用单位向量n描述旋转轴,和前面一样用

描述旋转量。

v'是向量v绕轴n旋转后的向量。让我们看看能否用v,n和

表示v‘。我们的想法是在垂直于n的平面中解决这个问题,那么这就转换为了一个简单的2D问题。为了做到这一点,将v分解为两个分量:

-------------------------------------------------------------------------------------------暂时发布还没有写完

魔乐社区(Modelers.cn) 是一个中立、公益的人工智能社区,提供人工智能工具、模型、数据的托管、展示与应用协同服务,为人工智能开发及爱好者搭建开放的学习交流平台。社区通过理事会方式运作,由全产业链共同建设、共同运营、共同享有,推动国产AI生态繁荣发展。
更多推荐


 1
1 0
0- 0



 已为社区贡献5条内容
已为社区贡献5条内容

所有评论(0)