第十五篇【传奇开心果系列】Python的OpenCV库技术点案例示例:图像配准
OpenCV是一个开源的计算机视觉库,它提供了各种功能和算法来处理图像和视频数据。其中之一就是图像配准(Image Registration),用于将多幅图像进行对齐和叠加,以实现图像的融合或比较。图像配准的目标是通过对图像进行变换,使它们在空间上对齐,从而能够进行有效的叠加或比较。常见的图像配准任务包括图像拼接、图像校正、图像配准等。在OpenCV中,可以使用不同的方法进行图像配准。其中一种常见
系列短博文目录
Python的OpenCV库技术点案例示例系列
短博文目录
前言
 OpenCV是一个开源的计算机视觉库,它提供了各种功能和算法来处理图像和视频数据。其中之一就是图像配准(Image Registration),用于将多幅图像进行对齐和叠加,以实现图像的融合或比较。图像配准的目标是通过对图像进行变换,使它们在空间上对齐,从而能够进行有效的叠加或比较。
OpenCV是一个开源的计算机视觉库,它提供了各种功能和算法来处理图像和视频数据。其中之一就是图像配准(Image Registration),用于将多幅图像进行对齐和叠加,以实现图像的融合或比较。图像配准的目标是通过对图像进行变换,使它们在空间上对齐,从而能够进行有效的叠加或比较。
一、常见的图像配准任务介绍
 常见的图像配准任务包括图像拼接、图像校正、图像配准等。
常见的图像配准任务包括图像拼接、图像校正、图像配准等。
在OpenCV中,可以使用不同的方法进行图像配准。其中一种常见的方法是基于特征点的配准方法。该方法首先检测图像中的特征点,然后通过匹配这些特征点来计算图像之间的变换关系,最终实现图像的对齐。OpenCV提供了多种特征点检测和匹配的算法,例如SIFT、SURF、ORB等。
除了基于特征点的配准方法,OpenCV还提供了其他的配准方法,例如基于亮度直方图的配准方法、基于相位相关性的配准方法等。这些方法可以根据具体的应用场景选择使用。
二、图像配准任务:图像拼接介绍和示例代码
 图像拼接是图像配准任务的一种应用它将多幅图像按照一定的方式拼接在一起,形成一张更大的图像。通常情况下,图像拼接的目标是消除图像之间的重叠部分,并保持整体图像的连续性和一致性。
图像拼接是图像配准任务的一种应用它将多幅图像按照一定的方式拼接在一起,形成一张更大的图像。通常情况下,图像拼接的目标是消除图像之间的重叠部分,并保持整体图像的连续性和一致性。
在OpenCV中,可以使用以下步骤进行图像拼接:
- 加载图像:使用OpenCV的
cv2.imread()函数加载待拼接的图像。 - 寻找特征点:对于每幅图像,使用特征点检测算法(如SIFT、SURF或ORB)找到关键点和描述子。
- 特征匹配:使用特征匹配算法(如FLANN或BFMatcher)对关键点进行匹配,找到图像之间的对应关系。
- 计算变换矩阵:根据匹配的特征点,使用RANSAC或其他方法计算图像之间的变换矩阵,如单应性矩阵(Homography)。
- 透视变换:根据计算得到的变换矩阵,对待拼接的图像进行透视变换,将其对齐到参考图像上。
- 图像融合:将对齐后的图像与参考图像进行融合,消除重叠区域,得到最终的拼接结果。
下面是一个简单的示例代码,演示了如何使用OpenCV进行图像拼接:
import cv2
import numpy as np
# 加载图像
image1 = cv2.imread('image1.jpg')
image2 = cv2.imread('image2.jpg')
# 寻找特征点
sift = cv2.SIFT_create()
keypoints1, descriptors1 = sift.detectAndCompute(image1, None)
keypoints2, descriptors2 = sift.detectAndCompute(image2, None)
# 特征匹配
matcher = cv2.BFMatcher()
matches = matcher.knnMatch(descriptors1, descriptors2, k=2)
# 筛选匹配点
good_matches = []
for m, n in matches:
if m.distance < 0.75 \* n.distance:
good_matches.append(m)
# 计算变换矩阵
src_pts = np.float32([keypoints1[m.queryIdx].pt for m in good_matches]).reshape(-1, 1, 2)
dst_pts = np.float32([keypoints2[m.trainIdx].pt for m in good_matches]).reshape(-1, 1, 2)
M, mask = cv2.findHomography(src_pts, dst_pts, cv2.RANSAC, 5.0)
# 透视变换
result = cv2.warpPerspective(image2, M, (image1.shape[1]+image2.shape[1], image2.shape[0]))
result[0:image1.shape[0], 0:image1.shape[1]] = image1
# 显示拼接结果
cv2.imshow('Image Stitching', result)
cv2.waitKey(0)
cv2.destroyAllWindows()
请注意,这只是一个简单的示例代码,并不考虑一些复杂的情况,如图像的旋转、缩放和畸变等。在实际应用中,可能需要更加复杂的算法和技术来处理这些情况。此外,还可以使用其他图像拼接库或工具来实现更高级的图像拼接功能。
三、图像配准任务:图像校正介绍和示例代码
 图像校正是图像配准任务的一种应用,它旨在将图像中的对象或场景几何校正,以消除图像的畸变或变形。常见的图像校正任务包括相机畸变校正、透视畸变校正等。
图像校正是图像配准任务的一种应用,它旨在将图像中的对象或场景几何校正,以消除图像的畸变或变形。常见的图像校正任务包括相机畸变校正、透视畸变校正等。
在OpenCV中,可以使用以下步骤进行图像校正:
- 加载图像:使用OpenCV的
cv2.imread()函数加载待校正的图像。 - 计算变换矩阵:根据校正的目标,选择相应的方法计算图像的变换矩阵。例如,对于相机畸变校正,可以使用相机标定技术来估计相机的畸变参数和内外参数;对于透视畸变校正,可以使用特征点检测和匹配算法来计算透视变换矩阵。
- 应用变换矩阵:使用计算得到的变换矩阵,对待校正的图像进行几何变换,实现图像的校正。例如,对于相机畸变校正,可以使用
cv2.undistort()函数;对于透视畸变校正,可以使用cv2.warpPerspective()函数。
下面是一个简单的示例代码,演示了如何使用OpenCV进行相机畸变校正:
import cv2
import numpy as np
# 加载相机标定数据
camera_matrix = np.load('camera\_matrix.npy')
dist_coeffs = np.load('dist\_coeffs.npy')
# 加载待校正的图像
image = cv2.imread('image.jpg')
# 相机畸变校正
undistorted_image = cv2.undistort(image, camera_matrix, dist_coeffs)
# 显示校正结果
cv2.imshow('Image Correction', undistorted_image)
cv2.waitKey(0)
cv2.destroyAllWindows()
请注意,上述示例代码中的相机标定数据需要通过相机标定技术事先获取,包括相机矩阵(camera_matrix)和畸变系数(dist_coeffs)。对于相机标定的具体步骤和算法,可以参考OpenCV官方文档或其他相关资料。
此外,对于透视畸变校正等其他类型的图像校正任务,可能需要使用不同的方法和技术。具体的实现方式取决于校正的目标和需求。
四、图像配准任务:图像配准介绍和示例代码
 图像配准是将多幅图像进行对齐和叠加的任务,以实现图像的融合或比较。常见的图像配准任务包括图像拼接、图像校正、图像配准等。
图像配准是将多幅图像进行对齐和叠加的任务,以实现图像的融合或比较。常见的图像配准任务包括图像拼接、图像校正、图像配准等。
在OpenCV中,可以使用以下步骤进行图像配准:
- 加载图像:使用OpenCV的
cv2.imread()函数加载待配准的图像。 - 寻找特征点:对于每幅图像使用特征点检测算法(如SIFT、SURF或ORB)找到关键点和描述子。
- 特征匹配:使用特征匹配算法(如FLANN或BFMatcher)对关键点进行匹配,找到图像之间的对应关系。
- 计算变换矩阵:根据匹配的特征点,使用RANSAC或其他方法计算图像之间的变换矩阵,如单应性矩阵(Homography)。
- 透视变换:根据计算得到的变换矩阵,对待配准的图像进行透视变换,将其对齐到参考图像上。
- 图像融合:将对齐后的图像与参考图像进行融合,消除重叠区域,得到最终的配准结果。
下面是一个简单的示例代码,演示了如何使用OpenCV进行图像配准:
import cv2
import numpy as np
# 加载图像
image1 = cv2.imread('image1.jpg')
image2 = cv2.imread('image2.jpg')
# 寻找特征点
sift = cv2.SIFT_create()
keypoints1, descriptors1 = sift.detectAndCompute(image1, None)
keypoints2, descriptors2 = sift.detectAndCompute(image2, None)
# 特征匹配
matcher = cv2.BFMatcher()
matches = matcher.knnMatch(descriptors1, descriptors2, k=2)
# 筛选匹配点
good_matches = []
for m, n in matches:
if m.distance < 0.75 \* n.distance:
good_matches.append(m)
# 计算变换矩阵
src_pts = np.float32([keypoints1[m.queryIdx].pt for m in good_matches]).reshape(-1, 1, 2)
dst_pts = np.float32([keypoints2[m.trainIdx].pt for m in good_matches]).reshape(-1, 1, 2)
M, mask = cv2.findHomography(src_pts, dst_pts, cv2.RANSAC, 5.0)
# 透视变换
result = cv2.warpPerspective(image2, M, (image1.shape[1]+image2.shape[1], image2.shape[0]))
result[0:image1.shape[0], 0:image1.shape[1]] = image1
# 显示配准结果
cv2.imshow('Image Registration', result)
cv2.waitKey(0)
cv2.destroyAllWindows()
请注意,这只是一个简单的示例代码,并不考虑一些复杂的情况,如图像的旋转、缩放和畸变等。在实际应用中,可能需要更加复杂的算法和技术来处理这些情况。此外,还可以使用其他图像配准库或工具来实现更高级的图像配准功能。
五、基于特征点的配准方法介绍和示例代码
 基于特征点的配准方法是图像配准中常用的一种方法,它通过检测图像中的特征点并匹配这些特征点,从而计算出图像之间的变换关系,实现图像的对齐和配准。
基于特征点的配准方法是图像配准中常用的一种方法,它通过检测图像中的特征点并匹配这些特征点,从而计算出图像之间的变换关系,实现图像的对齐和配准。
以下是基于特征点的配准方法的一般步骤:
- 特征点检测:使用特征点检测算法(如SIFT、SURF或ORB)在待配准的图像中提取特征点。这些特征点可以是图像中的角点、边缘点或其他显著的局部特征。
- 特征描述子计算:对于每个特征点,计算其对应的特征描述子,用于描述特征点周围的图像信息。常见的特征描述子包括SIFT描述子、SURF描述子或ORB描述子等。
- 特征匹配:对于两幅图像的特征描述子,使用特征匹配算法(如FLANN或BFMatcher)来进行特征点的匹配。匹配算法会根据特征描述子之间的相似度度量,找到图像之间的对应关系。
- 变换估计:根据匹配的特征点,使用RANSAC或其他方法来估计图像之间的变换模型,如单应性矩阵(Homography)或仿射变换。变换模型描述了一个图像中的点如何映射到另一个图像中的点。
- 图像对齐:根据计算得到的变换模型,对待配准的图像进行透视变换,将其对齐到参考图像上。这样可以使两幅图像在空间上对齐,以便后续的叠加或比较。
下面是一个简单的示例代码,演示了基于特征点的配准方法的实现:
import cv2
# 加载待配准的图像
image1 = cv2.imread('image1.jpg')
image2 = cv2.imread('image2.jpg')
# 创建SIFT特征检测器
sift = cv2.SIFT_create()
# 检测特征点并计算描述子
keypoints1, descriptors1 = sift.detectAndCompute(image1, None)
keypoints2, descriptors2 = sift.detectAndCompute(image2, None)
# 创建FLANN匹配器
matcher = cv2.FlannBasedMatcher()
matches = matcher.knnMatch(descriptors1, descriptors2, k=2)
# 筛选匹配点
good_matches = []
for m, n in matches:
if m.distance < 0.75 \* n.distance:
good_matches.append(m)
# 提取匹配点的坐标
src_pts = [keypoints1[m.queryIdx].pt for m in good_matches]
dst_pts = [keypoints2[m.trainIdx].pt for m in good_matches]
# 计算变换矩阵(单应性矩阵)
M, mask = cv2.findHomography(np.float32(src_pts), np.float32(dst_pts), cv2.RANSAC, 5.0)
# 对待配准图像进行透视变换
result = cv2.warpPerspective(image2, M, (image1.shape[1]+image2.shape[1], image2.shape[0]))
result[0:image1.shape[0], 0:image1.shape[1]] = image1
# 显示配准结果
cv2.imshow('Image Alignment', result)
cv2.waitKey(0)
cv2.destroyAllWindows()
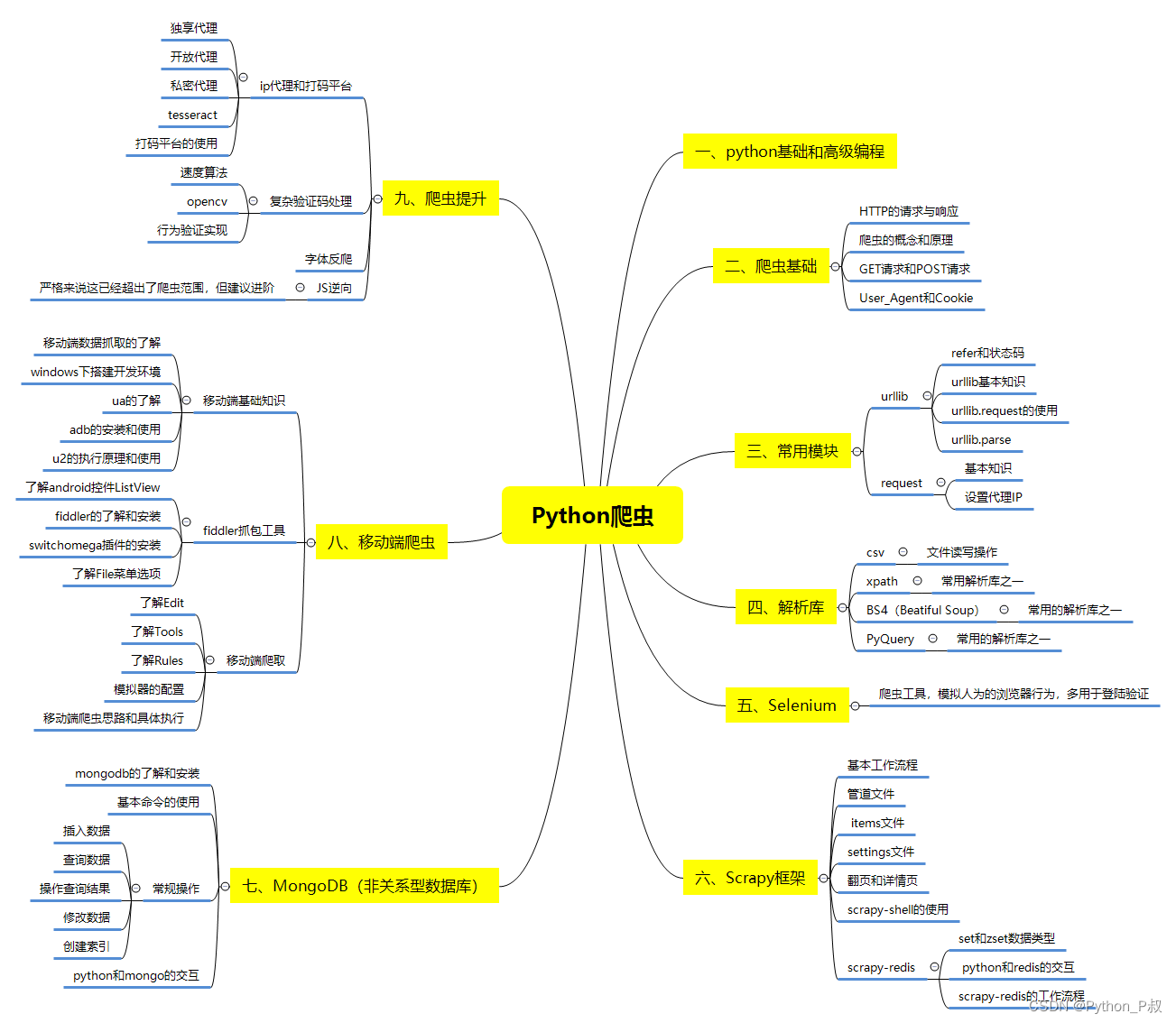
**一、Python所有方向的学习路线**
Python所有方向的技术点做的整理,形成各个领域的知识点汇总,它的用处就在于,你可以按照下面的知识点去找对应的学习资源,保证自己学得较为全面。
**二、Python必备开发工具**
工具都帮大家整理好了,安装就可直接上手!
**三、最新Python学习笔记**
当我学到一定基础,有自己的理解能力的时候,会去阅读一些前辈整理的书籍或者手写的笔记资料,这些笔记详细记载了他们对一些技术点的理解,这些理解是比较独到,可以学到不一样的思路。
**四、Python视频合集**
观看全面零基础学习视频,看视频学习是最快捷也是最有效果的方式,跟着视频中老师的思路,从基础到深入,还是很容易入门的。
**五、实战案例**
纸上得来终觉浅,要学会跟着视频一起敲,要动手实操,才能将自己的所学运用到实际当中去,这时候可以搞点实战案例来学习。
**六、面试宝典**
###### **简历模板**
**网上学习资料一大堆,但如果学到的知识不成体系,遇到问题时只是浅尝辄止,不再深入研究,那么很难做到真正的技术提升。**
**[需要这份系统化学习资料的朋友,可以戳这里无偿获取](https://bbs.csdn.net/topics/618317507)**
**一个人可以走的很快,但一群人才能走的更远!不论你是正从事IT行业的老鸟或是对IT行业感兴趣的新人,都欢迎加入我们的的圈子(技术交流、学习资源、职场吐槽、大厂内推、面试辅导),让我们一起学习成长!**

魔乐社区(Modelers.cn) 是一个中立、公益的人工智能社区,提供人工智能工具、模型、数据的托管、展示与应用协同服务,为人工智能开发及爱好者搭建开放的学习交流平台。社区通过理事会方式运作,由全产业链共同建设、共同运营、共同享有,推动国产AI生态繁荣发展。
更多推荐



 23
23 0
0- 0



 已为社区贡献10条内容
已为社区贡献10条内容

所有评论(0)