[PyTorch][chapter 61][强化学习-免模型学习 on-policy]
2:策略迭代算法估计的是 状态值函数(state value function) V,而最终的策略是通过 状态动作值函数(state-action value function) Q 来获得。累积奖赏采样值. 多次采样得到多条轨迹后,将每个状态-动作对的累积奖赏采样值进行平均。解决方案:一种直接的策略评估代替方法就是“采样”,然后求平均累积奖赏,作为期望累积奖赏的近似,模型未知的情况下,我们从起始
前言:
在现实的学习任务中,环境
其中的转移概率P,奖赏函数R 是未知的,或者状态X也是未知的
称为免模型学习(model-free learning)
目录:
1: 蒙特卡洛强化学习
2:同策略-蒙特卡洛强化学习
3: 异策略- 蒙特卡洛强化学习
一 蒙特卡洛强化学习
在免模型学习的情况下,策略迭代算法会遇到两个问题:
1: 是策略无法评估
因为无法做全概率展开。此时 只能通过在环境中执行相应的动作观察得到的奖赏和转移的状态、
解决方案:一种直接的策略评估代替方法就是“采样”,然后求平均累积奖赏,作为期望累积奖赏的近似,这称为“蒙特卡罗强化学习”。
2: 策略迭代算法估计的是 状态值函数(state value function) V,而最终的策略是通过 状态 动作值函数(state-action value function) Q 来获得。
模型已知时,有很简单的从 V 到 Q 的转换方法,而模型未知 则会出现困难。
解决方案:所以我们将估计对象从 V 转为 Q,即:估计每一对 “状态-动作”的值函数。
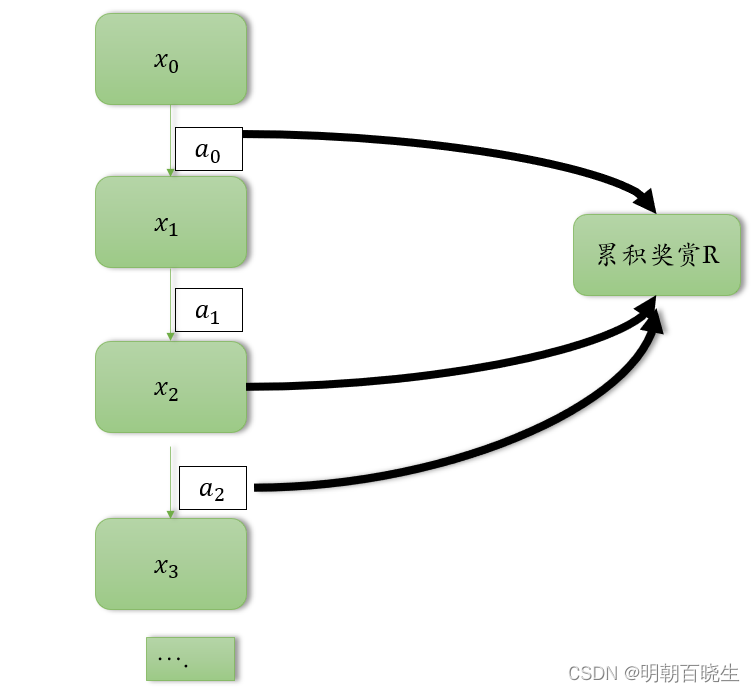
模型未知的情况下,我们从起始状态出发,使用某种策略进行采样,执行该策略T步,
并获得轨迹 ,
然后 对轨迹中出现的每一对 状态-动作,记录其后的奖赏之和,作为 状态-动作 对的一次
累积奖赏采样值. 多次采样得到多条轨迹后,将每个状态-动作对的累积奖赏采样值进行平均。即得到 状态-动作值函数的估计.
二 同策略蒙特卡洛强化学习
target Policy : 要优化的策略,也称为原始策略
behavior policy: 用来产生轨迹的策略
在on-policy 方案里面,两个策略相同。
要获得好的值函数估计,就需要不同的采样轨迹。
我们将确定性的策略 称为原始策略
原始策略上使用 -贪心法的策略记为
以概率
选择策略1: 策略1 :
以概率
选择策略2: 策略2:均匀概率选取动作,
对于最大化值函数的原始策略
其中贪心策略
中:
当前最优动作被选中的概率
每个非最优动作选中的概率 ,多次采样后将产生不同的采样轨迹。
因此对于最大值函数的原始策略,同样有
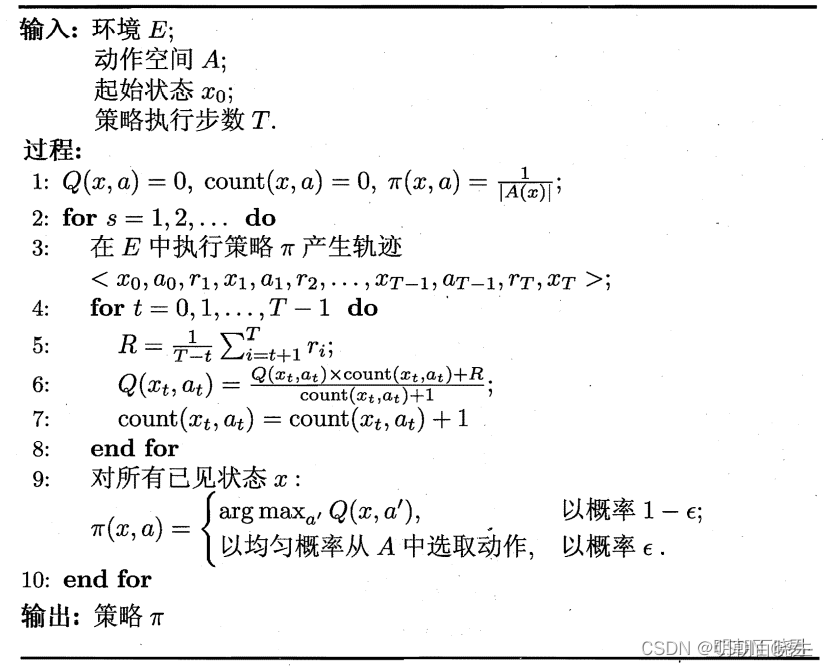
算法中,每采样一条轨迹,就根据该轨迹涉及的所有"状态-动作"对值函数进行更新
同策略蒙特卡罗强化学习算法最终产生的是E-贪心策略。然而,引入E-贪心策略是为了便于策略评估,而不是最终使用
三 同策略蒙特卡洛算法 Python
整个算法分为三部分:
迭代
1: 使用behavior policy 生成轨迹
2: 根据轨迹的样本,进行策略评估
3: 根据策略评估的结果Q(累积奖赏),优化target policy(选择状态-动作 最大值)
import numpy as ap
# -*- coding: utf-8 -*-
"""
Created on Fri Nov 3 09:37:32 2023
@author: chengxf2
"""
# -*- coding: utf-8 -*-
"""
Created on Thu Nov 2 19:38:39 2023
@author: cxf
"""
import random
from enum import Enum
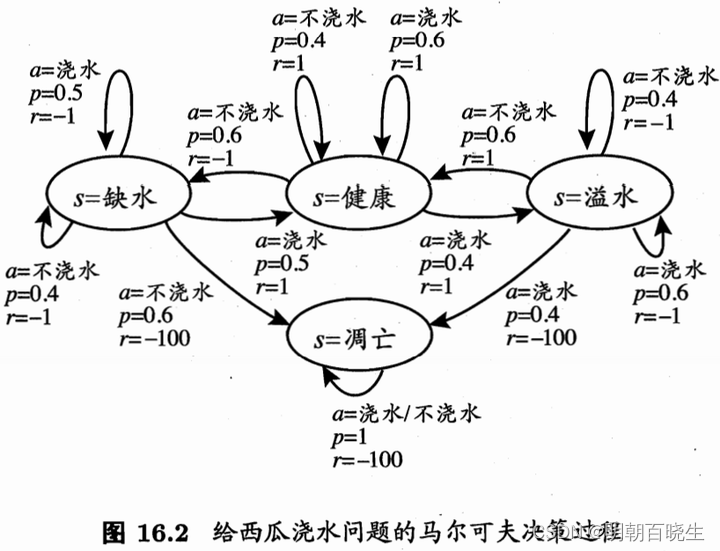
class State(Enum):
#状态空间#
shortWater =1 #缺水
health = 2 #健康
overflow = 3 #溢水
apoptosis = 4 #凋亡
class Action(Enum):
#动作空间A#
water = 1 #浇水
noWater = 2 #不浇水
class Env():
def getReward(self, nextState):
#针对转移到新的环境奖赏
r = -100
if nextState is State.shortWater:
r =-1
elif nextState is State.health:
r = 1
elif nextState is State.overflow:
r= -1
else:
r = -100
return r
def action(self, state, action):
if state is State.shortWater:
#print("\n state--- ",state, "\t action---- ",action)
if action is Action.water :
S =[State.shortWater, State.health]
proba =[0.4, 0.6]
else:
S =[State.shortWater, State.apoptosis]
proba =[0.5, 0.5]
elif state is State.health:
#健康
if action is Action.water :
S =[State.health, State.overflow]
proba =[0.6, 0.4]
else:
S =[State.shortWater, State.health]
proba =[0.6, 0.4]
elif state is State.overflow:
#溢水
if action is Action.water :
S =[State.overflow, State.apoptosis]
proba =[0.6, 0.4]
else:
S =[State.health, State.overflow]
proba =[0.6, 0.4]
else:
#凋亡
S =[State.apoptosis]
proba =[1.0]
#print("\n S",S, "\t prob ",proba)
nextState = random.choices(S, proba)[0]
reward= self.getReward(nextState)
return nextState,reward
def __init__(self):
self.name = "环境空间"
class Agent():
def initPolicy(self):
self.Q ={} #累积奖赏
self.count ={} #[state,action] 出现的次数
for state in self.S:
for action in self.A:
self. Q[state, action] = 0
self.count[state,action]= 0
def behavior(self,state):
#使用行为策略 behavior-policy
r = random.random()
if r<self.epsi:
#使用随机策略
A= self.A
randProb =[0.5,0.5]
action = random.choices(A, randProb)[0]
else:#使用target policy >1-epsi
action = self.policy[state]
return action
def generate(self,T):
#使用行为策略(e贪心策略),产生轨迹
#轨迹[s0,a0,r0],[s1,a1,r1]......[rT-1,aT-1,rT-1]
env = Env()
state = State.shortWater #从缺水开始
trajectory ={}
for t in range(T):
action = self.behavior(state)
nextState,reward = env.action(state, action)
trajectory[t] =[state, action, reward]
state = nextState
return trajectory
def evaluate(self,T ,trajectory):
#策略评估
denominator =0
for t in range(0,T):
denominator =T-t
R_t = 0
acc = 0
for i in range(t,T):
r = trajectory[i][-1]
acc = acc+r
R_t = acc/denominator #t时刻的累积奖赏
state_t = trajectory[t][0]
action_t = trajectory[t][1]
count = self.count[state_t, action_t]
self.Q[state_t, action_t] = (self.Q[state_t, action_t]*count+R_t)/(count+1)
self.count[state_t, action_t] +=1
def improve(self):
#策略提升
for state in self.S:
maxReward = self.Q[state,Action.water]
for action in self.A:
reward = self.Q[state,action]
if reward>=maxReward:
maxReward = reward
self.policy[state] = action
#print("\n state ",state, "\t maxReward ",maxReward)
def learn(self):
self.initPolicy()
#target policy 最终要优化的策略
self.policy ={}
T =15
for state in self.S:
self.policy[state] = Action.noWater
for s in range(1,self.epsidode): #采样第S 条轨迹
#使用e 贪心策略生成轨迹
trajectory = self.generate(T)
#策略评估
self.evaluate(T, trajectory)
print("\n 迭代次数 %d"%s ,"\t 缺水:",self.policy[State.shortWater].name,
"\t 健康:",self.policy[State.health].name,
"\t 溢水:",self.policy[State.overflow].name,
"\t 凋亡:",self.policy[State.apoptosis].name)
#策略improve
self.improve()
def __init__(self):
self.S = [State.shortWater, State.health, State.overflow, State.apoptosis]
self.A = [Action.water, Action.noWater]
self.Q ={} #累积奖赏
self.count ={}
self.policy ={}
self.epsidode =1000
self.epsi = 0.2
if __name__ == "__main__":
agent = Agent()
agent.learn()

魔乐社区(Modelers.cn) 是一个中立、公益的人工智能社区,提供人工智能工具、模型、数据的托管、展示与应用协同服务,为人工智能开发及爱好者搭建开放的学习交流平台。社区通过理事会方式运作,由全产业链共同建设、共同运营、共同享有,推动国产AI生态繁荣发展。
更多推荐



 0
0 0
0- 0



 已为社区贡献22条内容
已为社区贡献22条内容

所有评论(0)