遗传算法路径规划代码_路径规划A* 算法代码详解
A star.h首先放完整版代码:#include <vector>#include <list>using namespace std;const int kCost1 = 10; //直移一格消耗const int kCost2 = 14; //斜移一格消耗struct Point{int x, y; //点坐标,这里为了方便按照C++的数组来计算,x代表横排,y代表.

A star.h
首先放完整版代码:
#include <vector>
#include <list>
using namespace std;
const int kCost1 = 10; //直移一格消耗
const int kCost2 = 14; //斜移一格消耗
struct Point
{
int x, y; //点坐标,这里为了方便按照C++的数组来计算,x代表横排,y代表竖列
int F, G, H; //F=G+H
Point *parent; //parent的坐标,这里没有用指针,从而简化代码
/*Point(int _x, int _y) :x(_x), y(_y), F(0), G(0), H(0), parent(NULL)
{
}*/
Point(int _x, int _y)//变量初始化
{
x = _x;
y = _y;
F = 0;
G = 0;
H = 0;
parent = NULL;
}
};
class Astar
{
public:
void InitAstar(vector<vector<int>> &_maze);
list<Point *> GetPath(Point &startPoint, Point &endPoint, bool isIgnoreCorner);
private:
Point *findPath(Point &startPoint, Point &endPoint, bool isIgnoreCorner);
vector<Point *> getSurroundPoints(const Point *point, bool isIgnoreCorner) const;
bool isCanreach(const Point *point, const Point *target, bool isIgnoreCorner) const; //判断某点是否可以用于下一步判断
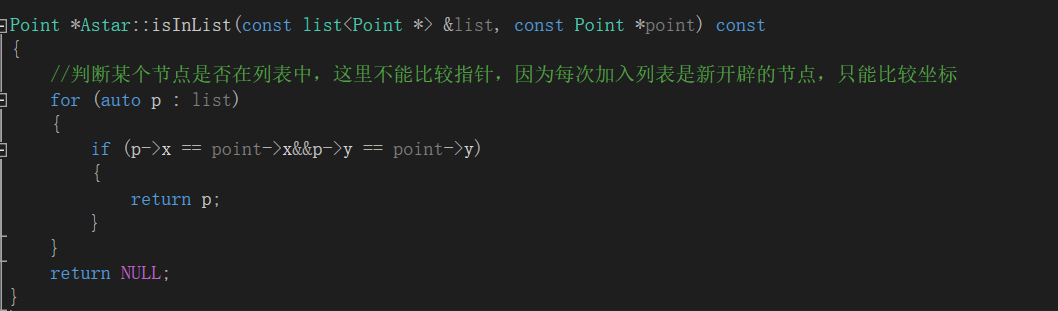
Point *isInList(const list<Point *> &list, const Point *point) const; //判断开启/关闭列表中是否包含某点
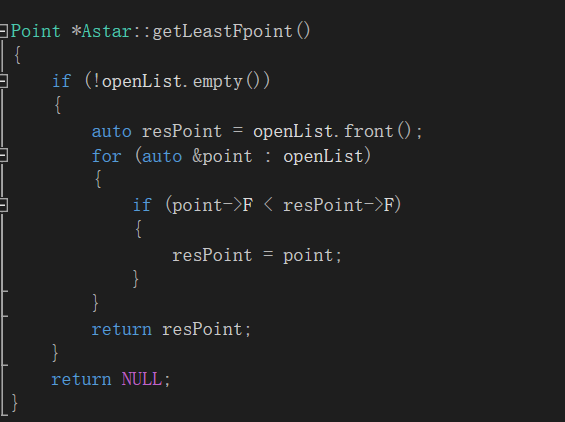
Point *getLeastFpoint(); //从开启列表中返回F值最小的节点
//计算FGH值
int calcG(Point *temp_start, Point *point);
int calcH(Point *point, Point *end);
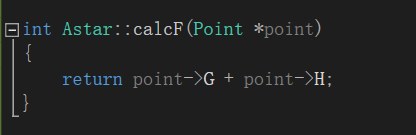
int calcF(Point *point);
private:
vector<std::vector<int>> maze;
list<Point *> openList; //开启列表
list<Point *> closeList; //关闭列表
};
void Astar::InitAstar(std::vector<std::vector<int>> &_maze)
{
maze = _maze;
}
int Astar::calcG(Point *temp_start, Point *point)
{
int extraG = (abs(point->x - temp_start->x) + abs(point->y - temp_start->y)) == 1 ? kCost1 : kCost2;
int parentG = point->parent == NULL ? 0 : point->parent->G; //如果是初始节点,则其父节点是空
return parentG + extraG;
}
int Astar::calcH(Point *point, Point *end)
{
//用简单的欧几里得距离计算H,这个H的计算是关键,还有很多算法,没深入研究^_^
//return sqrt((double)(end->x - point->x)*(double)(end->x - point->x) + (double)(end->y - point->y)*(double)(end->y - point->y))*kCost1;
return ((end->x - point->x) + end->y - point->y)*kCost1;
}
int Astar::calcF(Point *point)
{
return point->G + point->H;
}
Point *Astar::getLeastFpoint()
{
if (!openList.empty())
{
auto resPoint = openList.front();
for (auto &point : openList)
if (point->F<resPoint->F)
resPoint = point;
return resPoint;
}
return NULL;
}
Point *Astar::findPath(Point &startPoint, Point &endPoint, bool isIgnoreCorner)
{
openList.push_back(new Point(startPoint.x, startPoint.y)); //置入起点,拷贝开辟一个节点,内外隔离
while (!openList.empty())
{
auto curPoint = getLeastFpoint(); //找到F值最小的点
openList.remove(curPoint); //从开启列表中删除
closeList.push_back(curPoint); //放到关闭列表
//1,找到当前周围八个格中可以通过的格子
auto surroundPoints = getSurroundPoints(curPoint, isIgnoreCorner);
for (auto &target : surroundPoints)
{
//2,对某一个格子,如果它不在开启列表中,加入到开启列表,设置当前格为其父节点,计算F G H
if (!isInList(openList, target))
{
target->parent = curPoint;
target->G = calcG(curPoint, target);
target->H = calcH(target, &endPoint);
target->F = calcF(target);
openList.push_back(target);
}
//3,对某一个格子,它在开启列表中,计算G值, 如果比原来的大, 就什么都不做, 否则设置它的父节点为当前点,并更新G和F
else
{
int tempG = calcG(curPoint, target);
if (tempG<target->G)
{
target->parent = curPoint;
target->G = tempG;
target->F = calcF(target);
}
}
Point *resPoint = isInList(openList, &endPoint);
if (resPoint)
return resPoint; //返回列表里的节点指针,不要用原来传入的endpoint指针,因为发生了深拷贝
}
}
return NULL;
}
std::list<Point *> Astar::GetPath(Point &startPoint, Point &endPoint, bool isIgnoreCorner)
{
Point *result = findPath(startPoint, endPoint, isIgnoreCorner);
list<Point *> path;
//返回路径,如果没找到路径,返回空链表
while (result)
{
path.push_front(result);
result = result->parent;
}
// 清空临时开闭列表,防止重复执行GetPath导致结果异常
openList.clear();
closeList.clear();
return path;
}
Point *Astar::isInList(const std::list<Point *> &list, const Point *point) const
{
//判断某个节点是否在列表中,这里不能比较指针,因为每次加入列表是新开辟的节点,只能比较坐标
for (auto p : list)
if (p->x == point->x&&p->y == point->y)
return p;
return NULL;
}
bool Astar::isCanreach(const Point *point, const Point *target, bool isIgnoreCorner) const
{
if (target->x<0 || target->x>maze.size() - 1
|| target->y<0 || target->y>maze[0].size() - 1
|| maze[target->x][target->y] == 1
|| target->x == point->x&&target->y == point->y
|| isInList(closeList, target)) //如果点与当前节点重合、超出地图、是障碍物、或者在关闭列表中,返回false
return false;
else
{
if (abs(point->x - target->x) + abs(point->y - target->y) == 1) //非斜角可以
return true;
else
{
//斜对角要判断是否绊住
if (maze[point->x][target->y] == 0 && maze[target->x][point->y] == 0)
return true;
else
return isIgnoreCorner;
}
}
}
vector<Point *> Astar::getSurroundPoints(const Point *point, bool isIgnoreCorner) const
{
vector<Point *> surroundPoints;
for (int x = point->x - 1; x <= point->x + 1; x++)
for (int y = point->y - 1; y <= point->y + 1; y++)
if (isCanreach(point, new Point(x, y), isIgnoreCorner))
surroundPoints.push_back(new Point(x, y));
return surroundPoints;
}
测试 main.cpp
#include <math.h>
#include<iostream>
#include "A star .h"
using namespace std;
int main()
{
//初始化地图,用二维矩阵代表地图,1表示障碍物,0表示可通
vector<vector<int>> maze = {
{ 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1 },
{ 1, 0, 0, 1, 1, 0, 1, 0, 0, 0, 0, 1 },
{ 1, 0, 0, 1, 1, 0, 0, 0, 0, 0, 0, 1 },
{ 1, 0, 0, 0, 0, 0, 1, 0, 0, 1, 1, 1 },
{ 1, 1, 1, 0, 0, 0, 0, 0, 1, 1, 0, 1 },
{ 1, 1, 0, 1, 0, 0, 0, 0, 0, 0, 0, 1 },
{ 1, 0, 1, 0, 0, 0, 0, 1, 0, 0, 0, 1 },
{ 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1 }
};
Astar astar;
astar.InitAstar(maze);
//设置起始和结束点
Point start(1, 1);
Point end(6, 10);
//A*算法找寻路径
list<Point *> path = astar.GetPath(start, end, false);
//打印
for (auto &p : path)
cout << '(' << p->x << ',' << p->y << ')' << endl;
system("pause");
return 0;
}
测试结果
检验

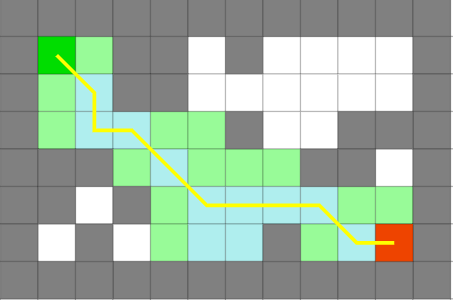
附:
http://qiao.github.io/PathFinding.js/visualqiao.github.io讲解
首先定义一个结构体:
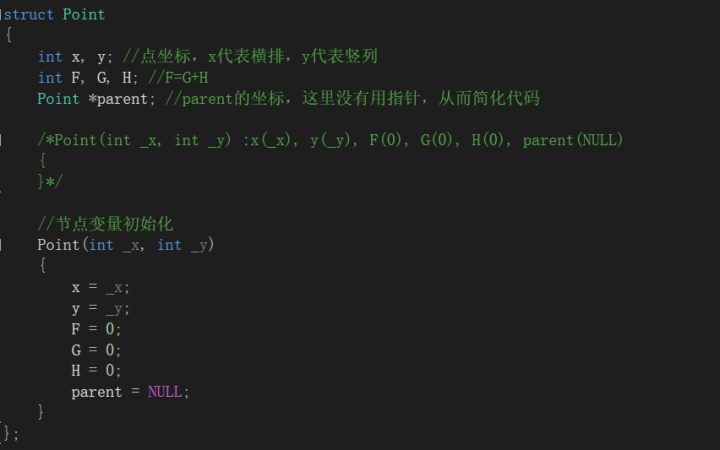
这个结构体就表示一个栅格,其中包括坐标(x,y),每一个栅格都有的FGH,G表示从起点到当前节点的路程,H表示当前节点到终点的预估。还包括父节点,也是Point类型的。在结构体里面对其初始化。
接下来定义一个类:
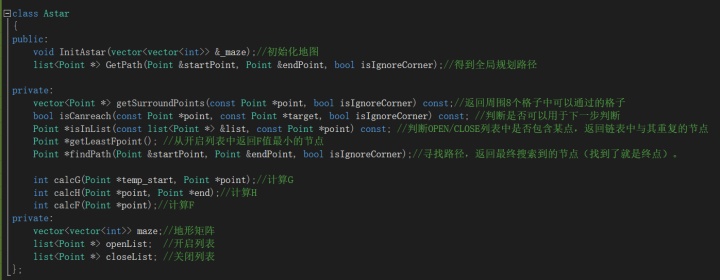
类中声明了10种函数,以及3个变量,意义见注释。
第一种函数InitAstar:

这个函数把地形矩阵传给Astar类中的maze二维向量,用于导航。
第二种函数用来计算从temp_start作为父节点这条路走过来的G值:

第三种函数计算H,这里我用的是曼哈顿距离,也可以用欧式距离:

第四种计算节点的F:
接下来的这个函数用于搜索openlist中F值最小的节点:
第六种函数用来判断某一个节点是否处于openlist或者closelist中,返会list中的这个重复的节点,没有重复的就返回空节点:
第七种函数用来看目标节点是否可以作为下一个搜索的中心点:
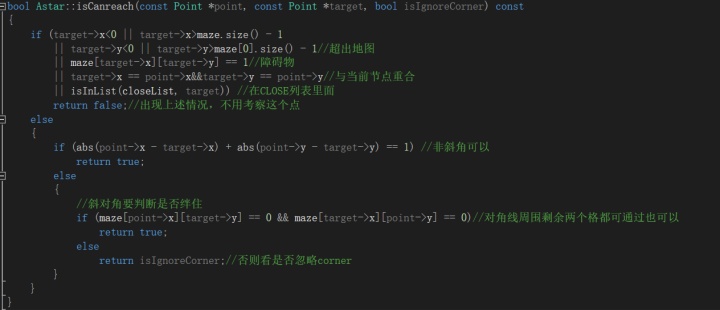
首先,目标节点若是不在地图中,或是目标节点是一个障碍物,或是目标点与当前节点重合,亦或是目标点已经在close链表中(考察过了),都表示这个点不在考察范围内。非上述情况,看目标点与当前点是否是斜角,如果不是,是否考虑corner都可以考察。这里说一下考虑corner的意义,如果考虑corner,那么斜着走时候两边不能有障碍物。如果两边都是0(没有障碍物),那么就可以考察,否则就看是否考虑corner,考虑就不能走这条路。
第八种函数用来把周围可选的点提取出来:
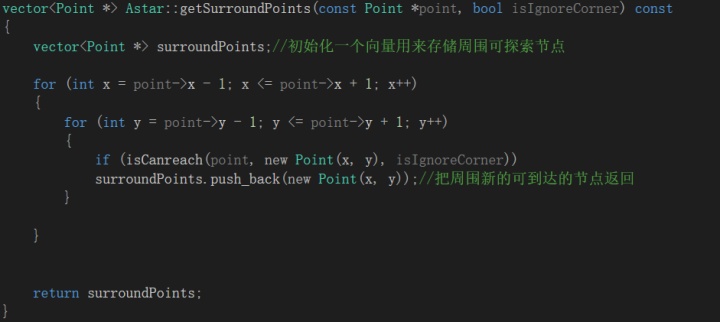
原理很简单:遍历周围8个周围点加上自身,把可考察的点放入一个向量中返回。
接下来就进行寻路函数:
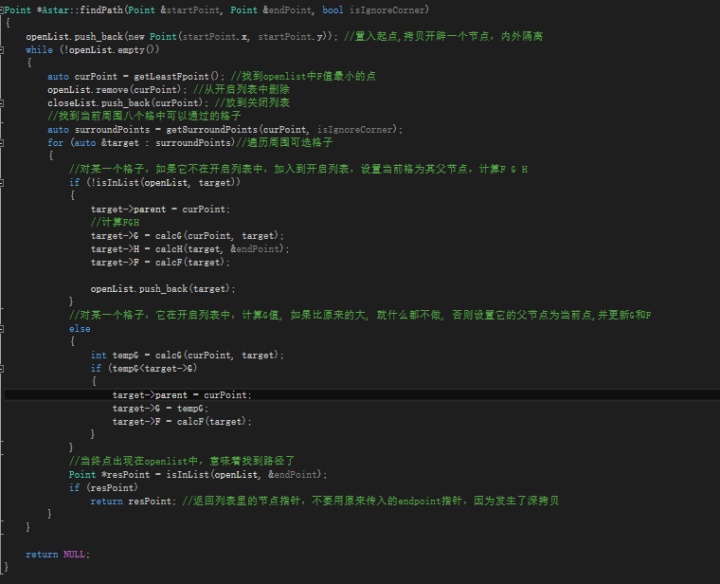
流程就是:先把起点放入openlist中,然后每次在open list中找最小F值,把它从openlist拿到closelist中,表示这个节点已经考察过了,然后对这个点周围的点进行考察,不在openlist,就先计算FGH值后加进去;如果已经在了,就更新FGH,更新父节点。一直更新下去,直到终点出现在openlist中就找到了。这时返回找到的点,否则返回空节点。
接下来把找到的路径存在一个链表中:
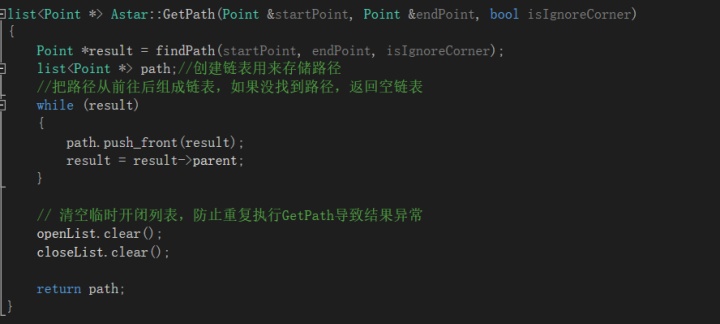
从终点开始,每次把它的父节点插入链表头,直到父节点为空,这样我们就得到了路径坐标。

魔乐社区(Modelers.cn) 是一个中立、公益的人工智能社区,提供人工智能工具、模型、数据的托管、展示与应用协同服务,为人工智能开发及爱好者搭建开放的学习交流平台。社区通过理事会方式运作,由全产业链共同建设、共同运营、共同享有,推动国产AI生态繁荣发展。
更多推荐


 1
1 0
0- 0



 已为社区贡献6条内容
已为社区贡献6条内容

所有评论(0)