基于动力学约束的路径规划
Kinodynamic path finding不考虑动力学约束,得到的轨迹是左边的紫色虚线,考虑动力学模型得到的是右边的虚线control spacestate space系统状态方程:s(导数)=As+Bu三个运动学模型:自行车模型、差速机器人模型、小车模型-----------------------------------------------------...
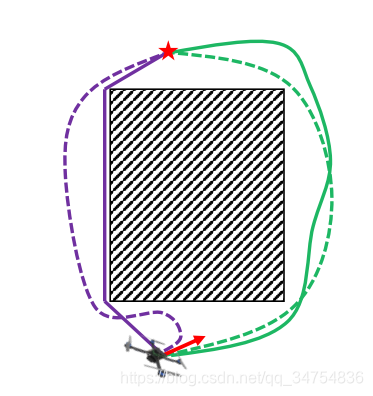
Kinodynamic path finding
不考虑动力学约束,得到的轨迹是左边的紫色虚线,考虑动力学模型得到的是右边的虚线
control space
state space
系统状态方程:s(导数)=As+Bu
三个运动学模型:自行车模型、差速机器人模型、小车模型
-------------------------------------------------------------------------------------------------------------------------------------------------------------------------
分界线
-------------------------------------------------------------------------------------------------------------------------------------------------------------------------
在状态空间的离散和在控制空间的离散方法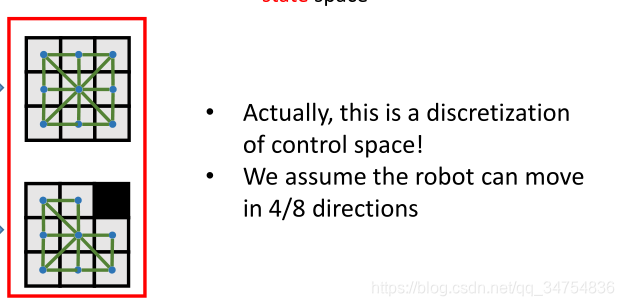
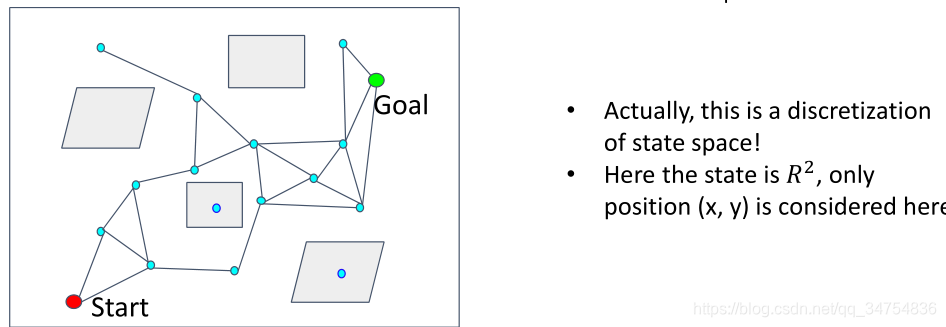
给定一个重点一个起点,计算链接这个两个点的“曲线”或者是“路线”
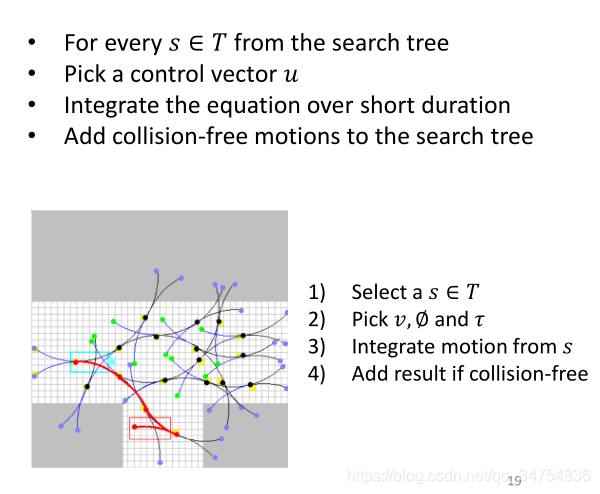
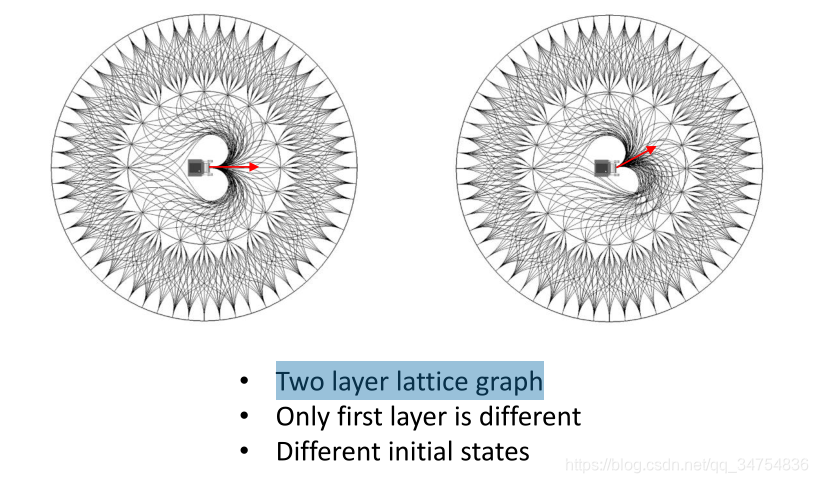
这个东西叫latic graph。
在控制空间采样不太好,在状态空间采样还是不错的
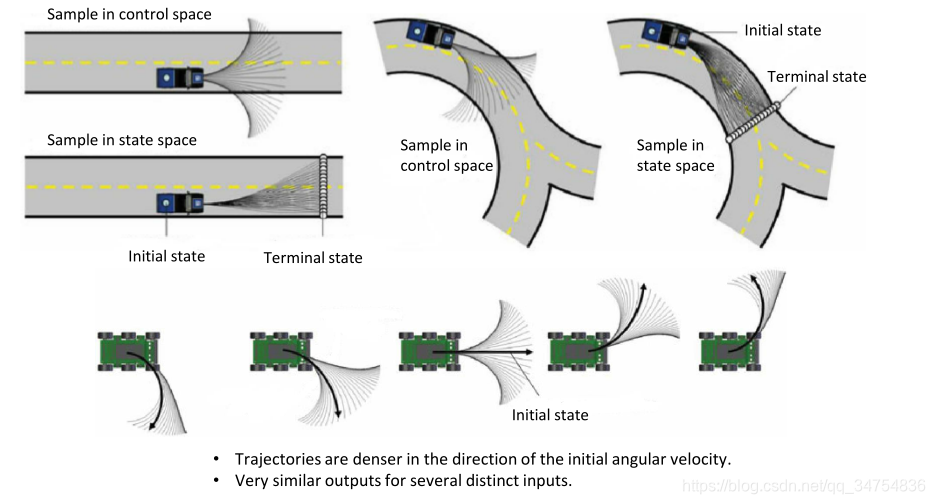
虽然状态空间的采样很好,但是很难实现!!!
-------------------------------------------------------------------------------------------------------------------------------------------------------------------------
分界线
-------------------------------------------------------------------------------------------------------------------------------------------------------------------------
BOUNDING VALUE PROBLEM (BVP)
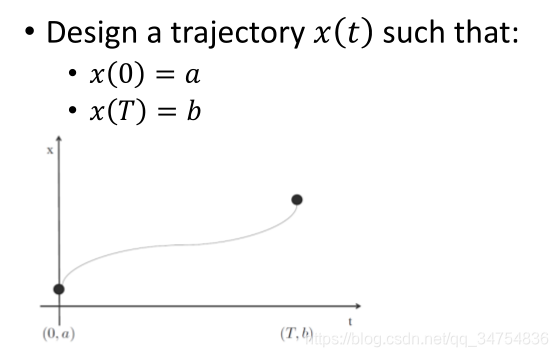
为了得到这么一个图,假设x(t)是一个5阶方程

-------------------------------------------------------------------------------------------------------------------------------------------------------------------------
分界线
-------------------------------------------------------------------------------------------------------------------------------------------------------------------------
Hybrid A*路径搜索算法 *****************应用广泛,用于自动驾驶。
结合了kinodynamic ,让路径变得更光滑,特点是,保证了每个栅格里有一个路径结点
-------------------------------------------------------------------------------------------------------------------------------------------------------------------------
分界线
-------------------------------------------------------------------------------------------------------------------------------------------------------------------------
动力学约束的RRT算法
在创建一个新的结点后,会进行局部重连接,找一个新的父节点,此时,应用动力学约束模型,优化连接线。具体的理论,在论证中有

魔乐社区(Modelers.cn) 是一个中立、公益的人工智能社区,提供人工智能工具、模型、数据的托管、展示与应用协同服务,为人工智能开发及爱好者搭建开放的学习交流平台。社区通过理事会方式运作,由全产业链共同建设、共同运营、共同享有,推动国产AI生态繁荣发展。
更多推荐



 1
1 0
0- 0



 已为社区贡献2条内容
已为社区贡献2条内容

所有评论(0)