【动手学运动规划】 3.2 随机性采样: RRT
人生若只如初见,何事秋风悲画扇
—纳兰性德《木兰花·拟古决绝词柬友》
🏰代码及环境配置:请参考 环境配置和代码运行!
3.2.1 RRT算法概述
- 定义与提出者:RRT算法(Rapidly-exploring Random Tree,快速探索随机树)由Steven M. LaValle和James J. Kuffner Jr.提出,通过随机构建Space Filling Tree实现对非凸高维空间的快速搜索。
- 应用场景:广泛应用于各种机器人的运动规划场景,特别是包含障碍物和差分运动约束的环境。
- 算法变种:包括Basic RRT、基于概率的RRT、RRT Connect和RRT算法,其中前三种属于单查询方法,而RRT属于渐近最优算法
3.2.2 RRT算法详解
3.2.2.1 Basic RRT算法
-
基本思想
将搜索的起点位置作为根节点,然后通过随机采样增加叶子节点的方式,生成一个随机扩展树,当随机树的叶子节点进入目标区域时,就得到了从起点位置到目标位置的路径。
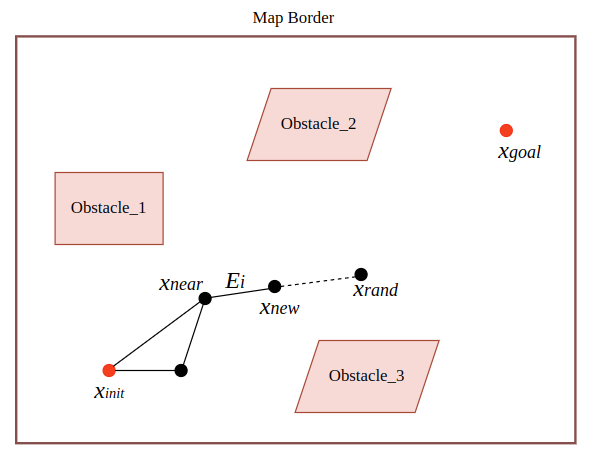
- 基本步骤
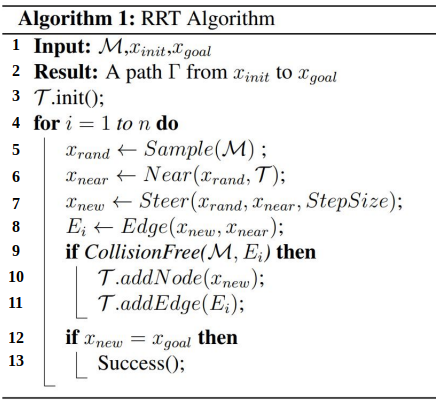
- 第3行:将起点 x i n i t x_{{init }} xinit初始化为搜索树 T \mathcal{T} T的根节点。
- 第5-8行:在构型空间内随机(一般使用均匀分布)生成一个节点 x r a n d x_{{rand }} xrand,并在搜索树 T \mathcal{T} T中取出距离采样点 x r a n d x_{{rand }} xrand最近的节点 x n e a r x_{{near }} xnear,然后沿着 x n e a r x_{{near }} xnear到 x r a n d x_{{rand }} xrand方向前进 S t e p S i z e StepSize StepSize得到 x n e w x_{{new }} xnew,继而得到边 E i ( x n e w , x n e a r ) E_{i} (x_{new},x_{near} ) Ei(xnew,xnear)。
- 第9-11行:利用 C o l l i s i o n F r e e CollisionFree CollisionFree方法检测该边是否与地图边界和障碍物碰撞。
- 若无碰撞,则成功完成一次空间搜索拓展,并将节点 x n e w x_{{new }} xnew和边 E i E_{i} Ei加到搜索树 T \mathcal{T} T中
- 若有碰撞,重新构建
- 第12-13行:若 x n e w x_{{new }} xnew到达目标点 x g o a l x_{{goal }} xgoal,则搜索树 T \mathcal{T} T构建完成。
-
优缺点
- 优点
- 适用范围广,参数简单,高维空间规划性能优秀
- 相比较于PRM算法,具有更高的效率
- 缺点
- 得到的并非最优路径,且每次搜索的路径具有随机性
- 在扩展节点时从无障碍区域内随机选择节点,会导致产生部分无用节点,节点利用率低,增加算法随机性的同时也降低了算法的收敛速度
- 优点
-
参数设置
RRT算法中非常重要的参数即步长 S t e p S i z e StepSize StepSize,其极大影响搜索树的形状
- 步长太大,可能无法成功绕过障碍物,且在终点附近来回跳动
- 步长太小,搜索树的构建耗时增加,且采样点非常密集
3.2.2.2 基于概率的RRT算法
-
基本思想
为了加快随机树收敛到目标位置的速度,基于概率的RRT算法在随机树的扩展的步骤中引入一个概率 p p p,以一定的概率 p p p来选择目标点 x g o a l x_{goal} xgoal作为随机点。引入向目标生长的机制可以加速路径搜索的收敛速度。
-
基本步骤
整体步骤和基本RRT相同,只需在选择随机点的时候稍作改变,如下:
x r a n d ← C h o o s e T a r g e t ( x g o a l , S a m p l e ( M ) , p ) x_{rand} \overset{}{\leftarrow} ChooseTarget\left ( x_{goal}, Sample\left ( \mathcal{M} \right ),p \right ) xrand←ChooseTarget(xgoal,Sample(M),p)
-
优缺点
- 优点:加速路径搜索的收敛速度
- 缺点:如果目标概率的不断加大,当障碍物遮挡目标时容易陷入局部搜索无法跳出(随机产生的分支太少了)
-
参数设置
引入的概率 p p p对随机树的扩展有一定的影响:- 概率 p p p越小( p = 0.001 p = 0.001 p=0.001),树的分支越多(过度随机采样,原始 RRT),会导致生长缺乏方向性
- 概率 p p p越小( p = 0.95 p = 0.95 p=0.95),树的分支越少(过度趋向目标采样,类似最佳优先的贪心搜索),会导致很难绕过障碍物找到目标点
3.2.2.3 RRT Connect
-
基本思想
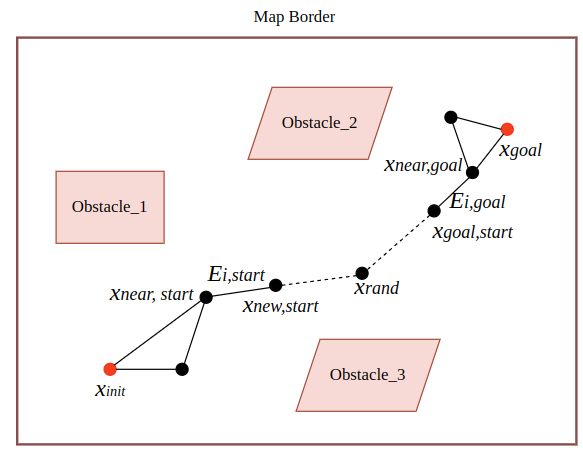
RRT-Connect分别以起点和目标点为根节点生成两棵树进行双向扩展,当两棵树建立连接时可认为路径规划成功。通过一次采样得到一个采样点,然后两棵搜索树同时向采样点方向进行扩展,加快两棵树建立连接的速度。
-
基本步骤
大概流程和Basic RRT类似,主要不同点在于:
- 双向扩展
- 在每次迭代中,随机选择一个采样点 x r a n d x_{rand} xrand 。
- 从随机树 T s t a r t \mathcal{T_{start} } Tstart和随机树 T g o a l \mathcal{T_{goal} } Tgoal中分别找到距离采样点 x r a n d x_{rand} xrand 最近的节点 x n e a r , s t a r t x_{near,start} xnear,start 和 x n e a r , g o a l x_{near,goal} xnear,goal 。
- 分别从 x n e a r , s t a r t x_{near,start} xnear,start 和 x n e a r , g o a l x_{near,goal} xnear,goal 向 x r a n d x_{rand} xrand 方向扩展一定步长 S t e p S i z e StepSize StepSize,得到新的候选节点 x n e w , s t a r t x_{new,start} xnew,start 和 x n e w , g o a l x_{new,goal} xnew,goal 。
- 检查新节点是否与障碍物碰撞,若无碰撞,则将其添加到对应的树中。
- 连接检查
- 在每次迭代后,检查两棵树是否“连接”,即检查随机树 T s t a r t \mathcal{T_{start} } Tstart中的任意节点是否与随机树 T g o a l \mathcal{T_{goal} } Tgoal中的任意节点足够接近(通常是在某个设定的阈值内)。
- 如果找到这样的节点对,则通过它们可以构建出一条从起点到目标的路径。
- 双向扩展
- 优缺点
- 优点:具有良好的搜索特性,相较于Basic RRT的搜索速度和搜索效率均有显著提高
- 缺点:单查询算法,最终路径不是最优的
3.2.2.4 RRT*算法
-
基本思想
Basic RRT,基于概率的RRT和RRT Connect算法虽然能快速的找到路径,但却不是最优路径。而RRT*算法的目标就在于解决RRT算法难以求解最优的可行路径问题,其在路径查找的过程中持续优化路径,随着迭代次数和采样点的增加,得到的路径越来越接近最优。
-
基本步骤
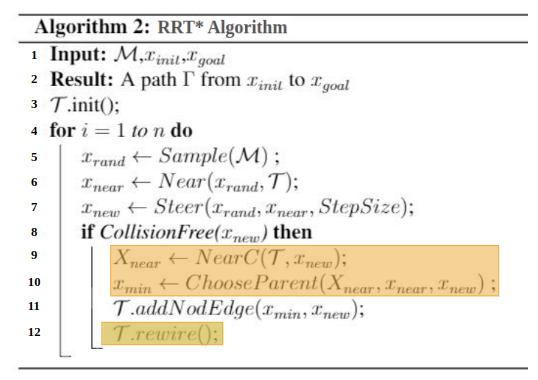
- 第5-8行:和Basic RRT算法相同,包括随机采样、寻找最近节点、确定新节点和碰撞检测
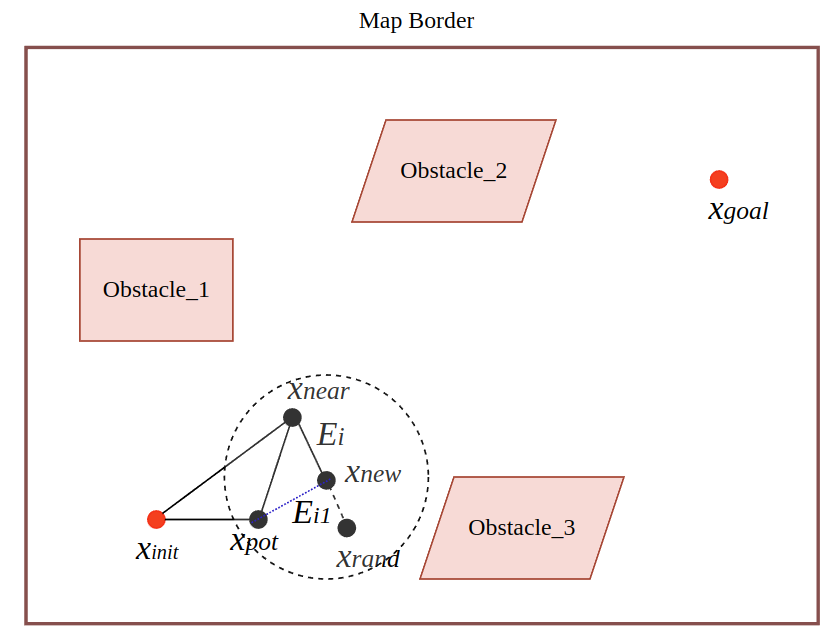
- 第9-10行:重新选择父节点,选择标准为以 x n e w x_{new} xnew为圆心, R R R为半径,找到所有潜在的父节点集合,并与父节点 x n e a r x_{near} xnear的cost对比(cost为初始节点 x i n i t x_{init} xinit到父节点,再到新节点 x n e w x_{new} xnew的总cost),若有更优cost的节点,则将其设为新节点 x n e w x_{new} xnew的父节点。如下图:当路径 { x i n i t → x p o t → x n e w } \left \{ x_{init}\overset{}{\rightarrow}x_{pot}\overset{}{\rightarrow} x_{new}\right \} {xinit→xpot→xnew} 的cost小于路径 { x i n i t → x n e a r → x n e w } \left \{ x_{init}\overset{}{\rightarrow}x_{near}\overset{}{\rightarrow} x_{new}\right \} {xinit→xnear→xnew} 的cost时,算法会将节点 x p o t x_{pot} xpot设为节点 x n e w x_{new} xnew的父节点,并将边 E i E_{i} Ei 删除,新增边 E i 1 E_{i1} Ei1 。
- 第11行:将新增的节点 x n e w x_{new} xnew和边 E i 1 E_{i1} Ei1 加入到随机树中。
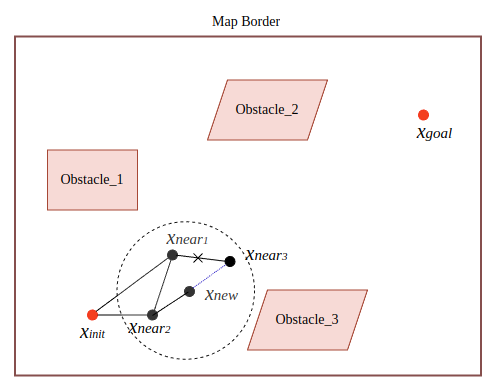
- 第12行:重新对随机树进行布线,如果近邻节点的父节点修改为新增的节点 x n e w x_{new} xnew,可以减少路径代价,则将新节点 x n e w x_{new} xnew设为近邻节点的父节点。如下图:若路径 { x i n i t → x n e a r 1 → x n e a r 3 } \left \{ x_{init}\overset{}{\rightarrow}x_{near1}\overset{}{\rightarrow} x_{near3}\right \} {xinit→xnear1→xnear3} 的cost大于路径 { x i n i t → x n e a r 2 → x n e w → x n e a r s } \left \{ x_{init}\overset{}{\rightarrow}x_{near2}\overset{}{\rightarrow} x_{new}\overset{}{\rightarrow}x_{nears} \right \} {xinit→xnear2→xnew→xnears}的cost,则将 x n e w x_{new} xnew设置为 x n e a r 3 x_{near3} xnear3的父节点,并将边 { x n e a r 1 → x n e a r 3 } \left \{ x_{near1} \overset{}{\rightarrow} x_{near3}\right \} {xnear1→xnear3}删除,新增边 { x n e w → x n e a r 3 } \left \{ x_{new} \overset{}{\rightarrow} x_{near3}\right \} {xnew→xnear3}。
-
优缺点
- 优点:通过引入重新选择父节点和重新对随机树进行布线步骤,RRT*算法能够不断优化路径,提高路径的质量和长度。这使得最终生成的路径更加平滑,减少了路径中的冗余和不必要的转折。
- 缺点:与RRT算法相比,RRT*算法需要更多的计算资源和时间来进行路径的优化和重新连接。这可能导致在实时性要求较高的场景中,*算法的性能受到一定影响。
-
参数设置
半径 R R R对算法有一定的影响:
- R R R太小( R = 0.5 R=0.5 R=0.5):每次优化的临近点很少,优化力度太小,路径类似与 RRT算法。
- R R R太大( R = 500 R=500 R=500):每次优化的邻居点非常多(比如包括起点),增加计算量,降低搜索效率,而且会引入一些不必要的路径,进而影响路径质量。
3.2.2.4 RRT*的拓展算法(不做详细介绍)
- Kinodynamic-RRT:* 在传统的RRT算法中,节点 x n e w x_{new} xnew和节点 x n e a r x_{near} xnear之间直接使用直线连接,其不满足智能体的动力学约束,因此可以将直线更换为其他曲线(例如贝塞尔曲线等)或者使用优化的方式求路径。
Kinodynamic RRT: Optimal Motion Planning for Systems with Linear Differential Constraints
https://www.youtube.com/watch?v=RB3g_GP0-dU - Anytime-RRT:* Anytime-RRT算法能够在机器人执行当前轨迹的同时,不断地更新和优化路径树,这意味着算法能够在机器人运动过程中实时地适应环境的变化,找到更优的路径。 由于算法具有实时优化的能力,因此它特别适合在动态环境中使用。在动态环境中,障碍物的位置和形状可能会发生变化,Anytime-RRT算法能够及时地调整路径规划,确保机器人能够安全地到达目的地。
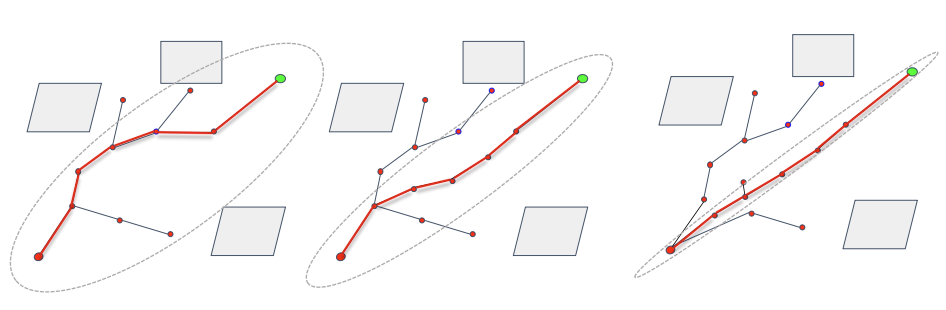
Anytime-RRT * 算法路径规划演示 - Informed RRT:* RRT在地图空间中采样进行均匀撒点,采样点会布及整个地图从而导致很多不必要的采样。Informed RRT把采样的范围限制在一个椭圆里面,以起始点和终点作为椭圆的焦点,以 RRT*生成的路径长度 L 作为椭圆上点到焦点的距离之和,在椭圆内进行采样,随着生成的路径越来越优化,长度越来越短,椭圆也会越来越扁,从而集中采样点进行了有效的路径优化。
Informed RRT: Optimal sampling-based path planning focused via direct sampling of an admissible ellipsoidal heuristic*
- Cross-entropy motion planning(交叉熵运动规划): 利用交叉熵方法(Cross-Entropy Method, CEM)来估计稀有事件概率,并将其与采样运动规划方法(如RRT*)相结合。CEM通过迭代地更新采样分布来指导采样过程,使其更加关注于生成低成本的路径或轨迹。这种自适应采样策略有助于在复杂环境中找到高质量的解决方案。
Cross-Entropy Randomized Motion Planning
3.2.c RRT代码解析
本节提供了RRT和RRT Star算法的代码测试.
python3 tests/sampling_based_planning/rrt_test.py
python3 tests/sampling_based_planning/rrt_star_test.py
两个算法运行的环境(地图和障碍物分布均相同),并通过函数实现(这一部分可根据自己需求进行修改):
def construct_env_info():
# Set map [min, max].
map_area = [-4, 15]
# Set obstacle list info [x, y, radius].
obstacleList = [
(5, 2, 3),
(10, 4, 2),
(3, 12, 2),
(0, 6, 2),
(5, 8, 1.5),
(10, 10, 3),
]
return map_area, obstacleList
3.2.c.1 RRT算法实现
在tests/sampling_based_planning/rrt.py 中给定start point和goal point,在上述构建的地图环境中进行测试,代码如下:
get_random_node : 获取随机点
get_nearest_node_index :在已有 的node list中找到最近点
steer :按照一定的步长往前计算得到新节点
check_if_outside_play_area:判断新节点是否出了地图
check_collision :判断是否节点和边有碰撞
calc_dist_to_goal :判断是否到终点了,即算法结束
generate_final_course :使用回溯的方式得到最终的路径
def planning(self, animation=True):
# rrt path planning.
self.node_list = [self.start]
for i in range(self.max_iter):
rnd_node = self.get_random_node()
nearest_ind = self.get_nearest_node_index(self.node_list, rnd_node)
nearest_node = self.node_list[nearest_ind]
new_node = self.steer(nearest_node, rnd_node, self.expand_dis)
if self.check_if_outside_play_area(
new_node, self.play_area
) and self.check_collision(new_node, self.obstacle_list, self.robot_radius):
self.node_list.append(new_node)
# Visualization.
if animation and i % 2 == 0:
self.draw_graph(rnd_node)
# Check whether the path has arrived the goal point.
if (
self.calc_dist_to_goal(self.node_list[-1].x, self.node_list[-1].y)
<= self.expand_dis
):
final_node = self.steer(self.node_list[-1], self.end, self.expand_dis)
if self.check_collision(
final_node, self.obstacle_list, self.robot_radius
):
return self.generate_final_course(len(self.node_list) - 1)
return None # cannot find path
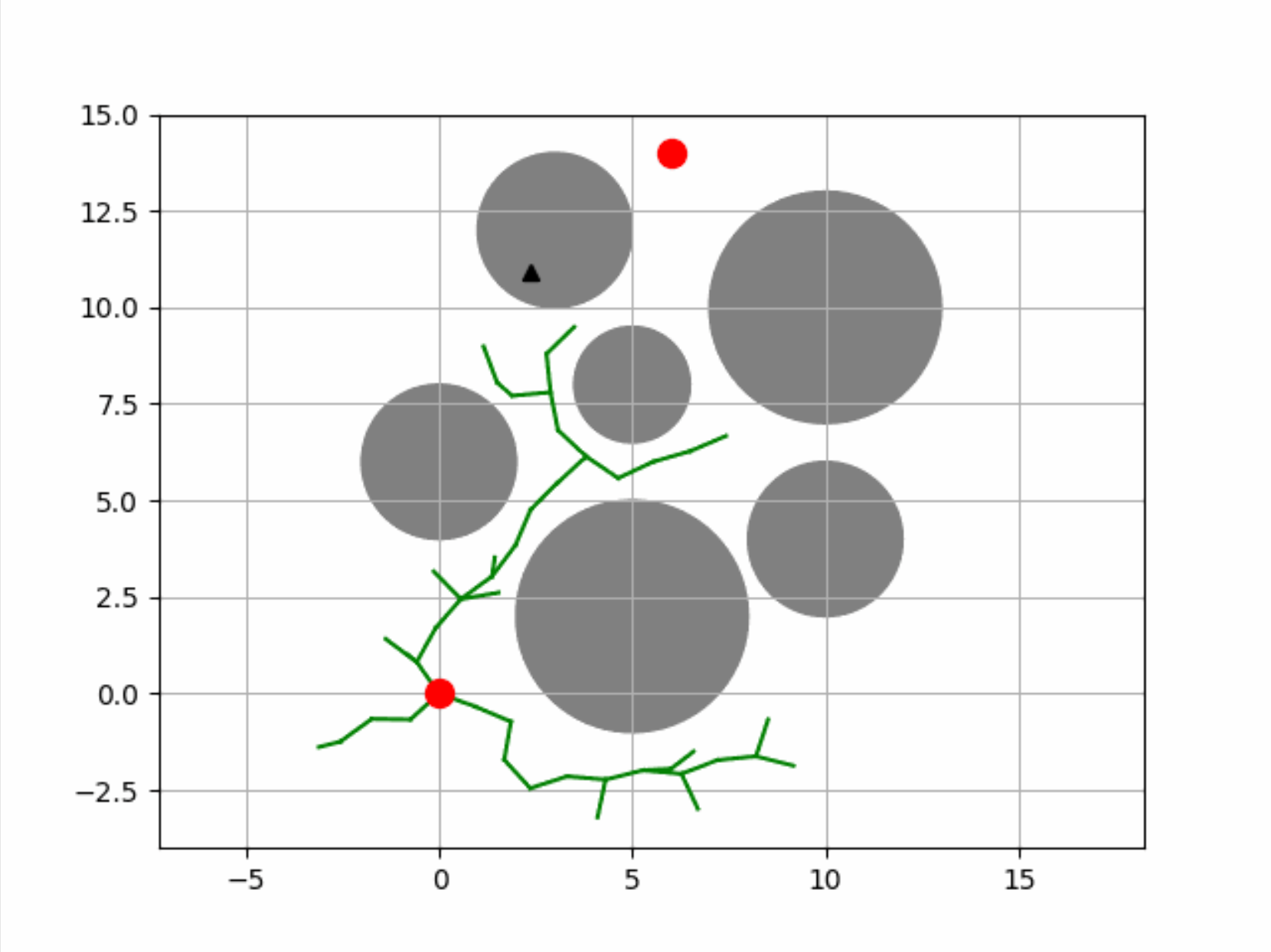
测试结果如下,可以看到RRT算法可以找到一条从起点到终点的路径(但不是最优的)。
3.2.c.2 RRT Star算法实现
RRT Star的算法实现和RRT的算法实现大体相同,为了保证代码的独立性,将其定义在tests/sampling_based_planning/rrt_star.py 中,并在上述构建的地图环境中进行测试,代码如下:
除了与RRT算法中相同的函数,此处不再赘述,其他的函数定义如下:
new_node.cost :每个节点定义了cost,此处用的是欧式距离
choose_parent :给新节点重新寻找父节点
rewite :随机树的重布线
search_best_goal_node :在当前的迭代情况下,找寻最优的目标节点
def planning(self, animation=True):
# rrt star path planning
self.node_list = [self.start]
for i in range(self.max_iter):
rnd = self.get_random_node()
nearest_ind = self.get_nearest_node_index(self.node_list, rnd)
new_node = self.steer(self.node_list[nearest_ind], rnd, self.expand_dis)
near_node = self.node_list[nearest_ind]
new_node.cost = near_node.cost + math.hypot(
new_node.x - near_node.x, new_node.y - near_node.y
)
if self.check_collision(new_node, self.obstacle_list, self.robot_radius):
near_inds = self.find_near_nodes(new_node)
node_with_updated_parent = self.choose_parent(new_node, near_inds)
if node_with_updated_parent:
self.rewite(node_with_updated_parent, near_inds)
self.node_list.append(node_with_updated_parent)
else:
self.node_list.append(new_node)
if animation and i % 2 == 0:
self.draw_graph(rnd)
if (not self.search_until_max_iter) and new_node: # if reaches goal
last_index = self.search_best_goal_node()
if last_index is not None:
return self.generate_final_course(last_index)
last_index = self.search_best_goal_node()
if last_index is not None:
return self.generate_final_course(last_index)
return None
测试结果如下,可以看到RRT Star算法得到的路径相比RRT算法得到的路径更优。
🏎️自动驾驶小白说官网:https://www.helloxiaobai.cn

魔乐社区(Modelers.cn) 是一个中立、公益的人工智能社区,提供人工智能工具、模型、数据的托管、展示与应用协同服务,为人工智能开发及爱好者搭建开放的学习交流平台。社区通过理事会方式运作,由全产业链共同建设、共同运营、共同享有,推动国产AI生态繁荣发展。
更多推荐


 17
17 0
0- 0



 已为社区贡献3条内容
已为社区贡献3条内容

所有评论(0)