全局路径规划:图搜索算法介绍1(BFS/DFS)
·
对于全局路径规划的设计,我们先要了解什么是图搜索,在此之前,要先知道什么是图: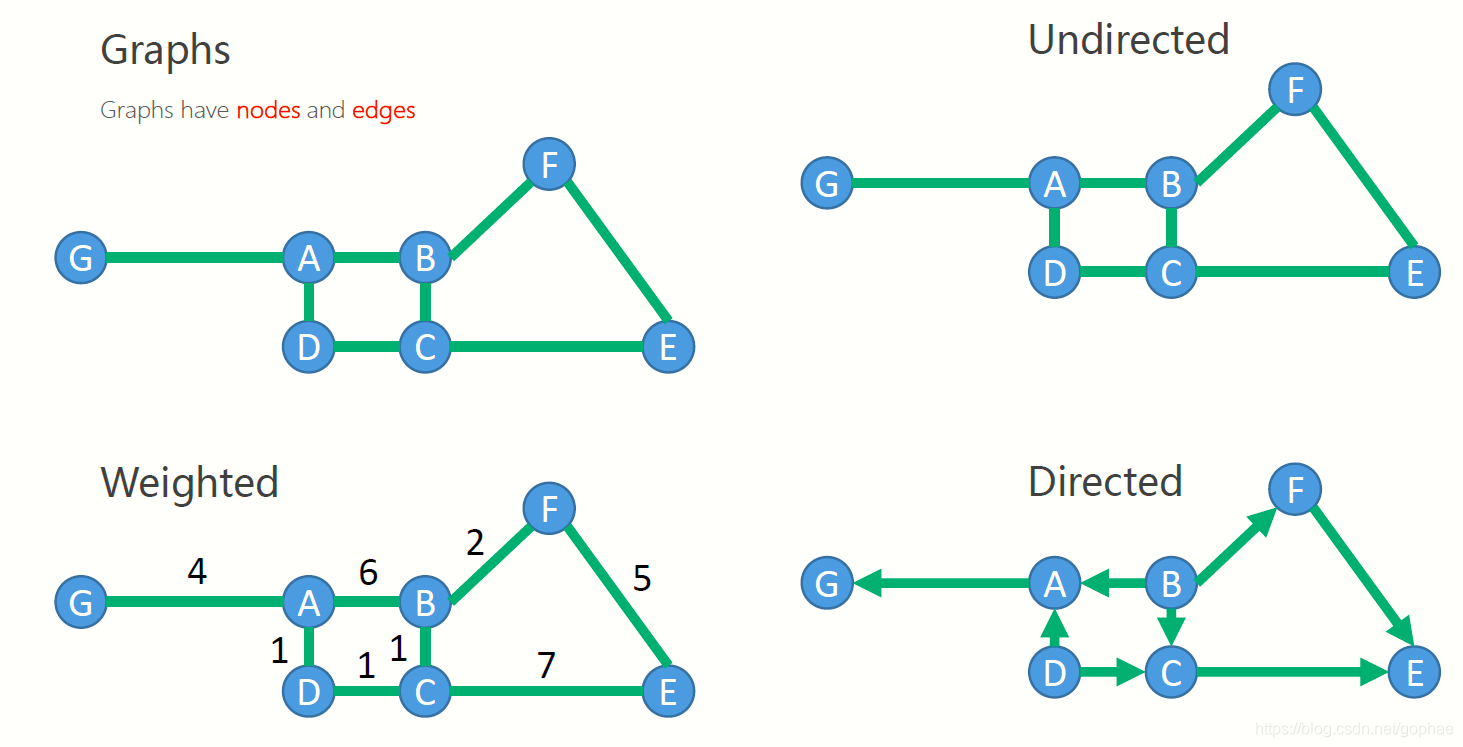
可以看到,图有很多种,有无向图,有向图,节点之间还可以有不同的weight, 用于表述从节点与节点直接迁移的代价。
而图搜索算法则是把我们的搜索对象抽象成state space gragh 来处理。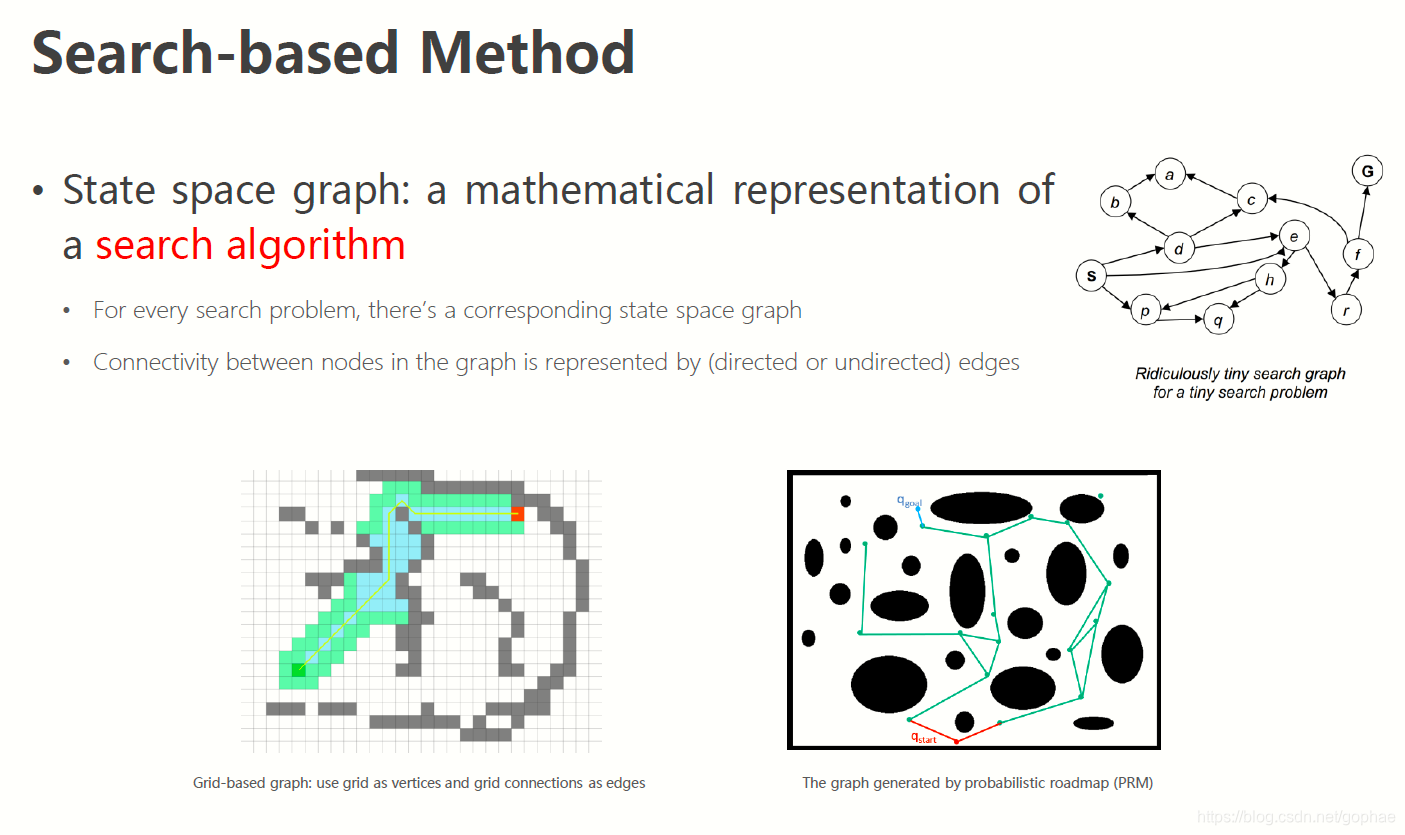
基本的理论无外乎用树的理论对图进行搜索,当找到终点后在回溯这一分支,最后获得从起点到终点的路径,而可以优化的地方就是如何有效减少这些搜索,从而加速搜索,同时还要保证搜索结果的最优性。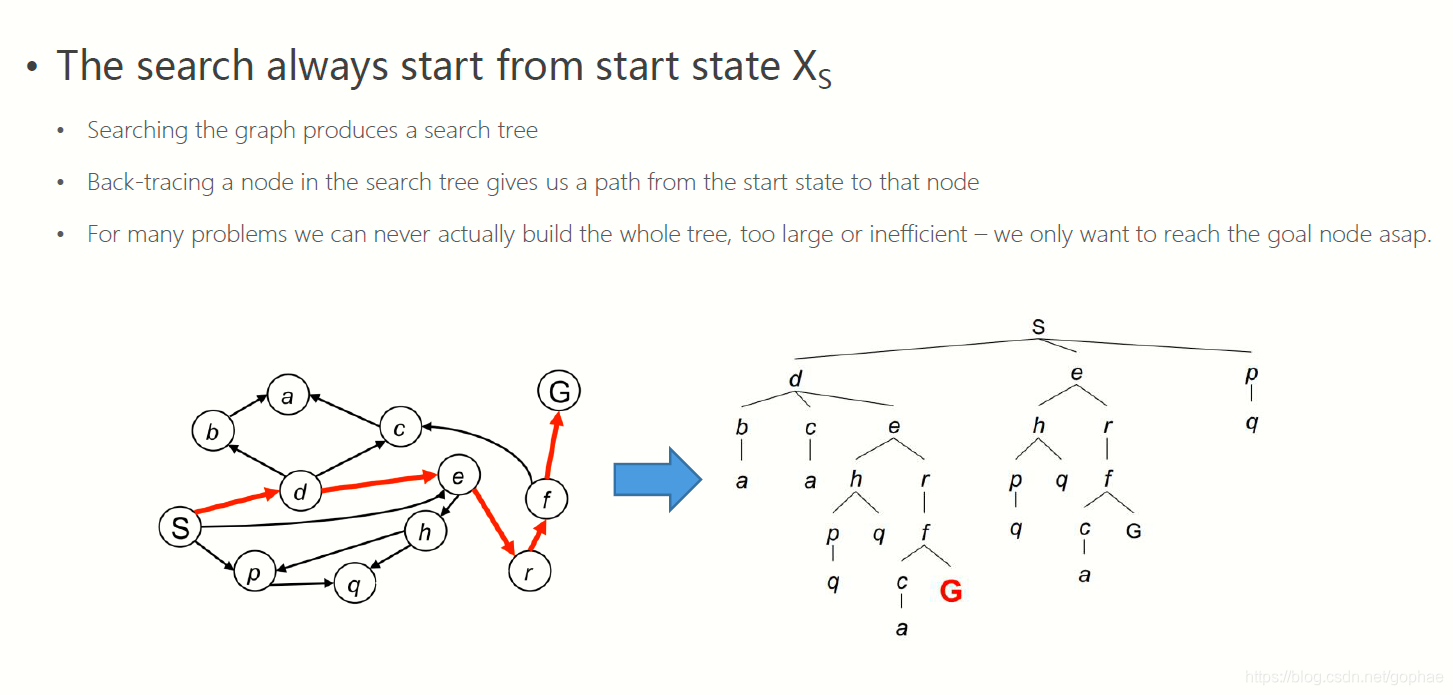
伪代码的流程如下:
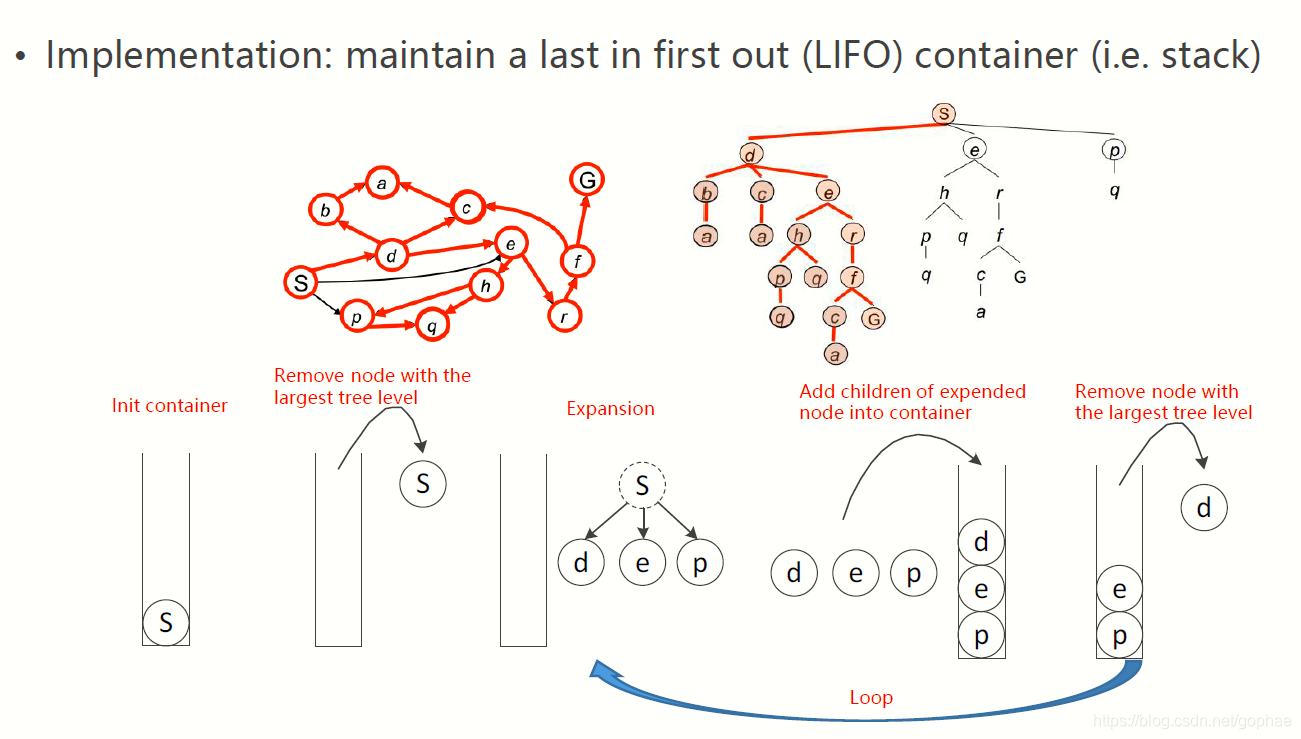
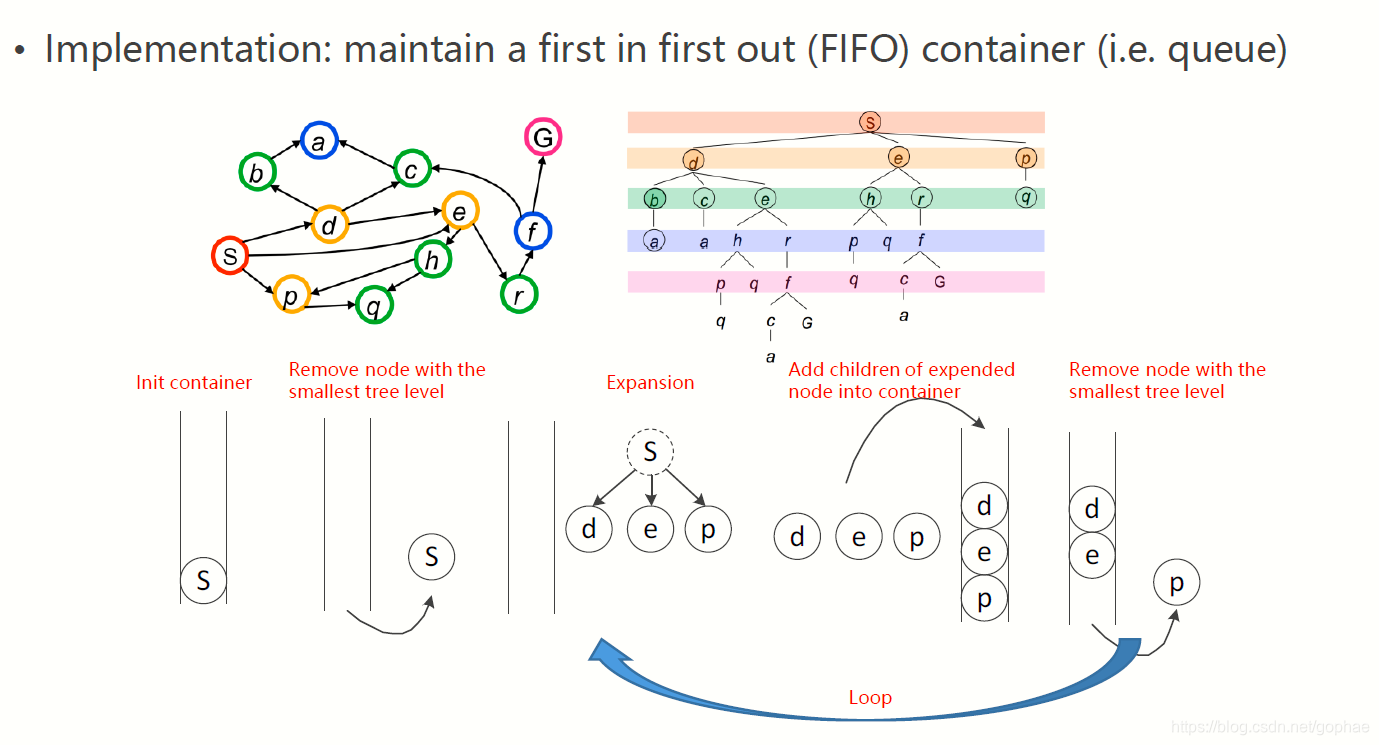
我们会不断地更新一个open list, 我们也可以称之为container容器。用于不断地从父节点更新子节点,更新完后,将父节点放到closed集合中,表示这个点已经被搜索过。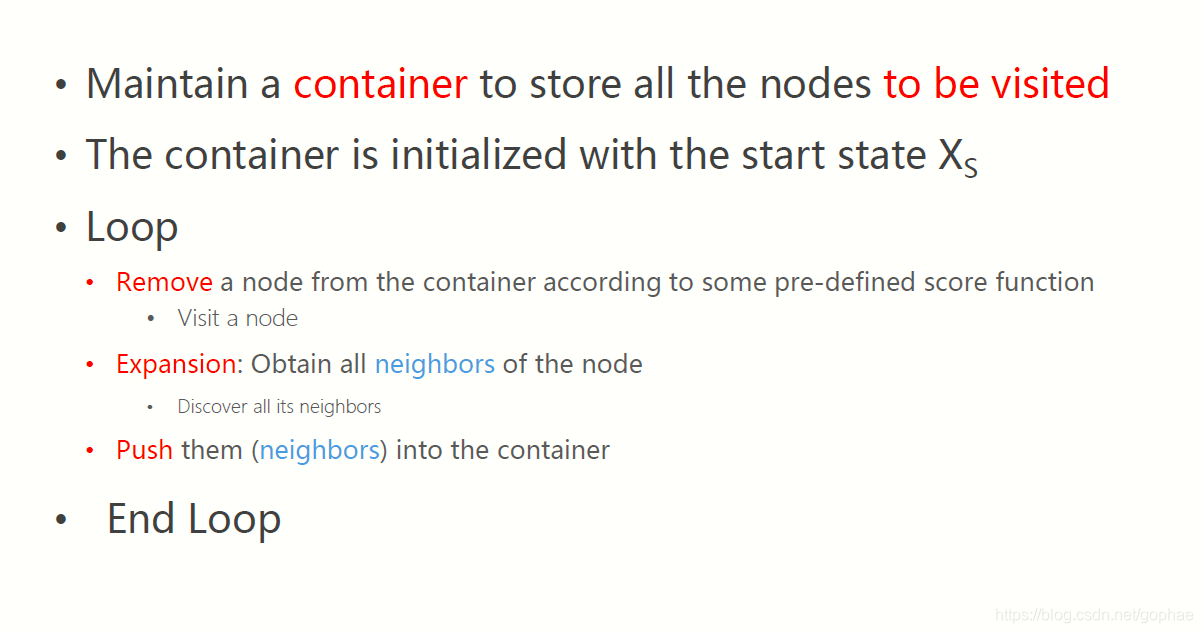
主要的最基础的四个路径搜索算法是BFS, DFS, Dja, A*
BFS 和 DFS的很大的一个区别就是深度优先搜索是队列搜索,先进去的先出来。 而广度优先搜索怎么堆栈,总是最后进去的先出来。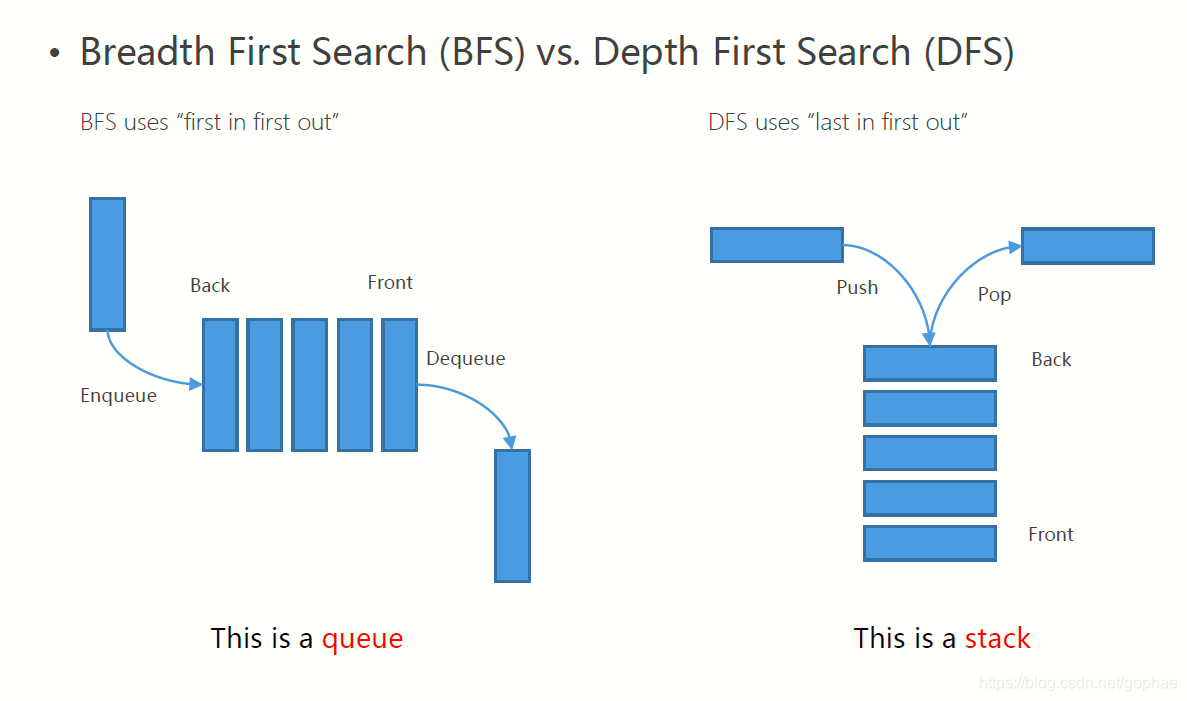
具体的说,DFS总是向最深的方向搜索,如果失败,则把这一支删除: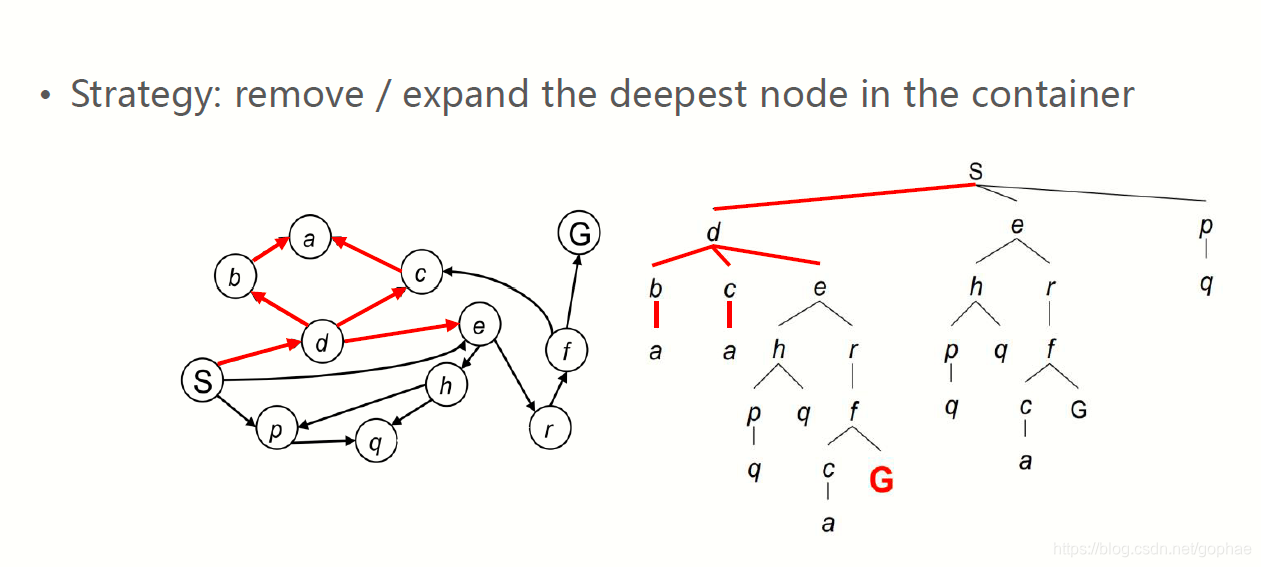
相比之下, BFS则是以广度作为搜索优先,总是搜索最浅的层级: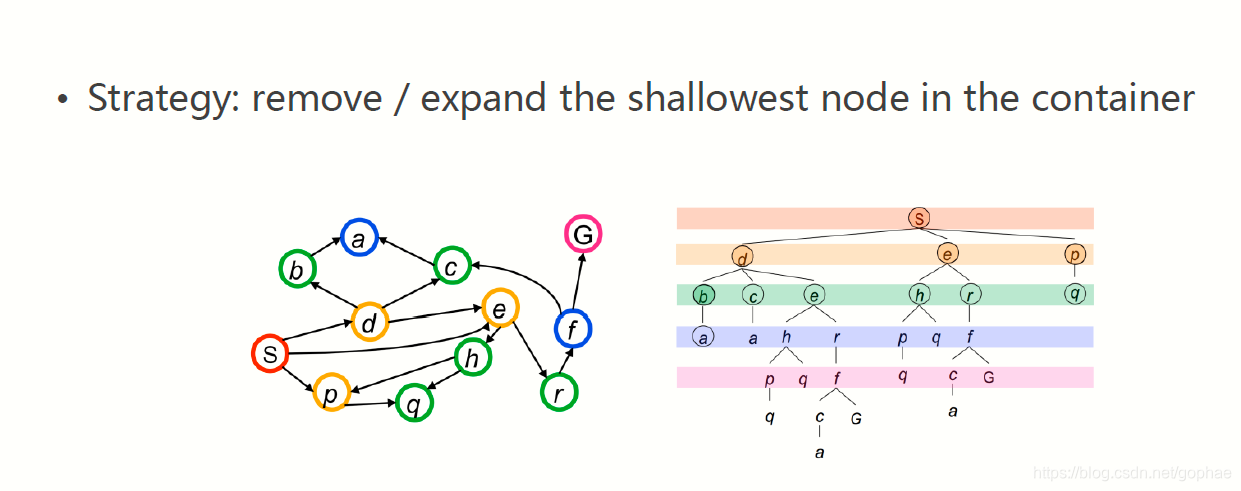
所以,这里可以看到,广度优先搜索会 比深度优先搜索范围更大,虽然可以绝对保证最优性结果,但是效率远不及深度优先,而深度优先的问题则在于无法保证最优。

魔乐社区(Modelers.cn) 是一个中立、公益的人工智能社区,提供人工智能工具、模型、数据的托管、展示与应用协同服务,为人工智能开发及爱好者搭建开放的学习交流平台。社区通过理事会方式运作,由全产业链共同建设、共同运营、共同享有,推动国产AI生态繁荣发展。
更多推荐


 1
1 0
0- 0



 已为社区贡献4条内容
已为社区贡献4条内容

所有评论(0)