运动控制及机器视觉融合编程平台介绍
运动控制与机器视觉融合编程工具介绍。功能代码一键生成,使用界面简单清晰,支持生成C++, C#代码。支持设备配置、运动控制、视觉定位、工件计数/ 抓取、轮廓提取等功能的快速部署
欢迎来到广州研为官方频道!我们将在频道中不断更新运动控制案例讲解、小型项目代码讲解、运动控制知识科普、机器视觉知识科普等内容,只为与您一起交流分享运动控制的那些事。
目录
Hi大家好哇,这次我们为大家带来的是我们的免费的快速开发工具——运动控制及机器视觉融合编程平台(Motion Vision Codev Stuido, MVC),名字虽长但特点都在名字里,下面是关于它的介绍↓↓↓
- 简单易上手
- 支持代码一键生成
- 界面简洁直观
- 运动控制 + 机器视觉融合开发
- 支持生成C/C++,C#,VBnet代码
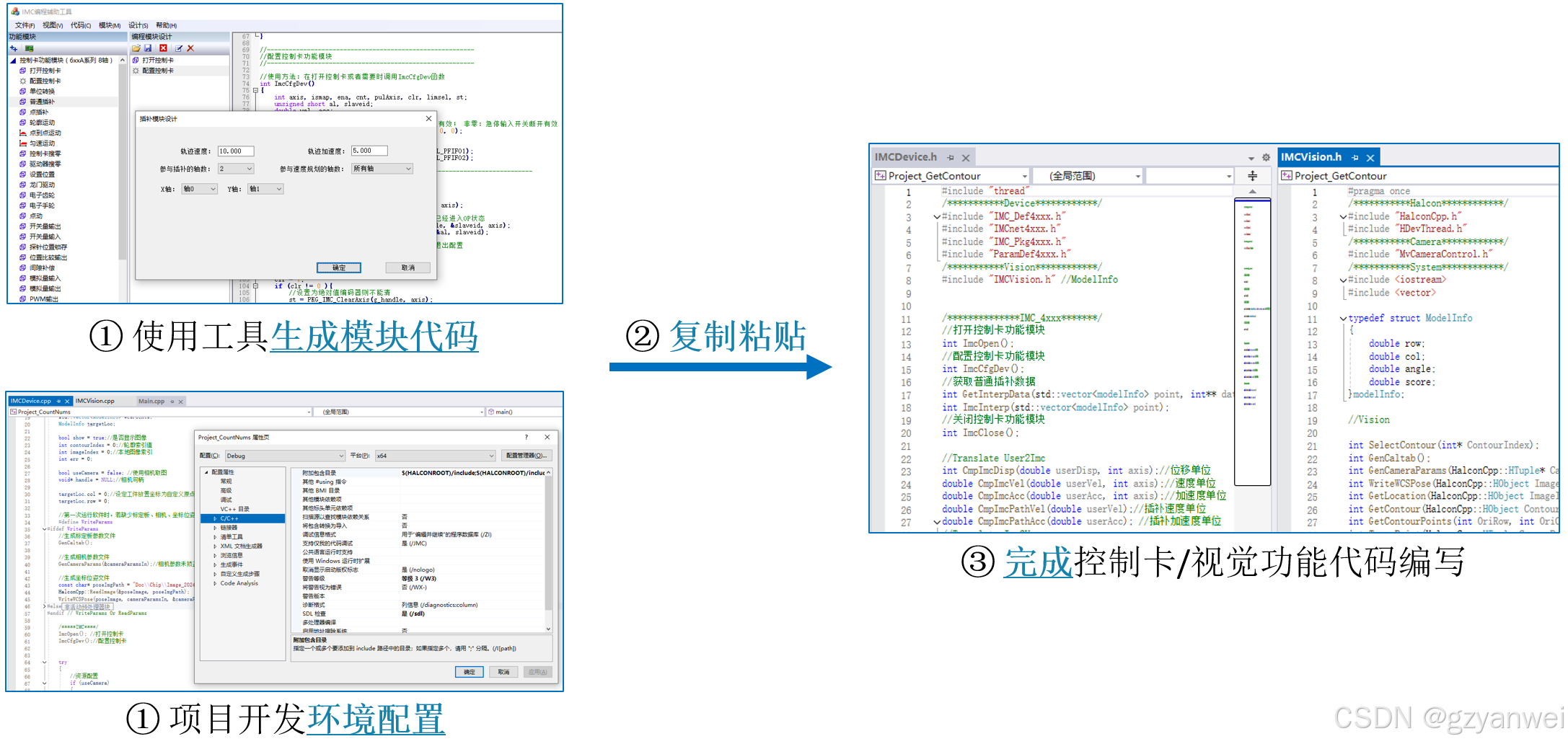
使用编程工具开发项目一共有这几步要走:
- 使用工具生成模块代码
- 复制代码
- 配置项目开发环境
- 粘贴代码
- 调试程序,结束!
这款免费开发工具能够降低大家对机器视觉、运动控制卡的开发难度和开发时间,同时我们也立志为各位提供一款好用的融合编程工具,我们将坚持工具的开发初衷并不断完善。
视频介绍:MVC软件介绍
1 软件功能
工具中提供了两个模块:运动控制、机器视觉。
同时,工具包含有视觉与运动控制的融合开发项目示例(示例介绍在第三章),欢迎各位通过示例了解视觉与运动控制的融合开发过程。
1.1 控制卡模块
控制卡模块使用广州研为的控制卡函数库,函数库控制功能好用全面,在开发以及调试程序期间也支持用控制卡配套的软件监控运行信息。控制卡的主要功能在这里为大家列举一下:
- 点位/ 速度/ 齿轮/ 龙门等运动功能
- 反向间隙补偿
- 位置捕获锁存FIF0
- 硬件位置/ 位移比较输出功能
- 两轴圆弧/ 任意多轴的直线/ 螺旋 ( 圆弧+直线 ) 插补
- 微小线段连续插补
- 可在插补段中插入非插补指令
- 轮廓运动 ( 上位机粗插补, 控制卡样条拟合精插补 )
- 比例跟随 ( 参数值按比例跟随另一参数值变化 )
- PWM 输出的占空比/ 频率可跟随部分参数值按线性比例输出或位置同步输出 (PSO)
- 支持长字符用户自定义加密
1.2 视觉模块
视觉模块使用的是Halcon的函数库,部署在工具中的示例代码以面向功能的形式整理并生成。希望工具能够在降低大家开发视觉功能的难度与时间的同时,也能为各位提供新的开发思路。视觉模块的主要功能在这里为大家列举一下:
- 选择目标轮廓
- 获取标定板参数
- 相机标定
- 创建坐标位姿
- 搜索目标工件
- 定位目标工件
- 获取轮廓坐标
- 转换坐标点
- 打开图像窗口
- 相机采集图像
2 软件使用
正如开篇所说,使用软件进行开发非常简单:选择模块、配置参数、项目环境配置、复制粘贴。所有模块支持自由选择,可按需求随心配置,功能代码一键生成。
一切一切,仅为帮助开发者们更好更快地完成运动控制与机器视觉的项目开发,助力让更多人实现触手可及的运动控制与机器视觉融合开发。
3 开发示例
目前工具内提供了两个控制卡与机器视觉融合开发的示例:工件抓取、轮廓坐标提取。
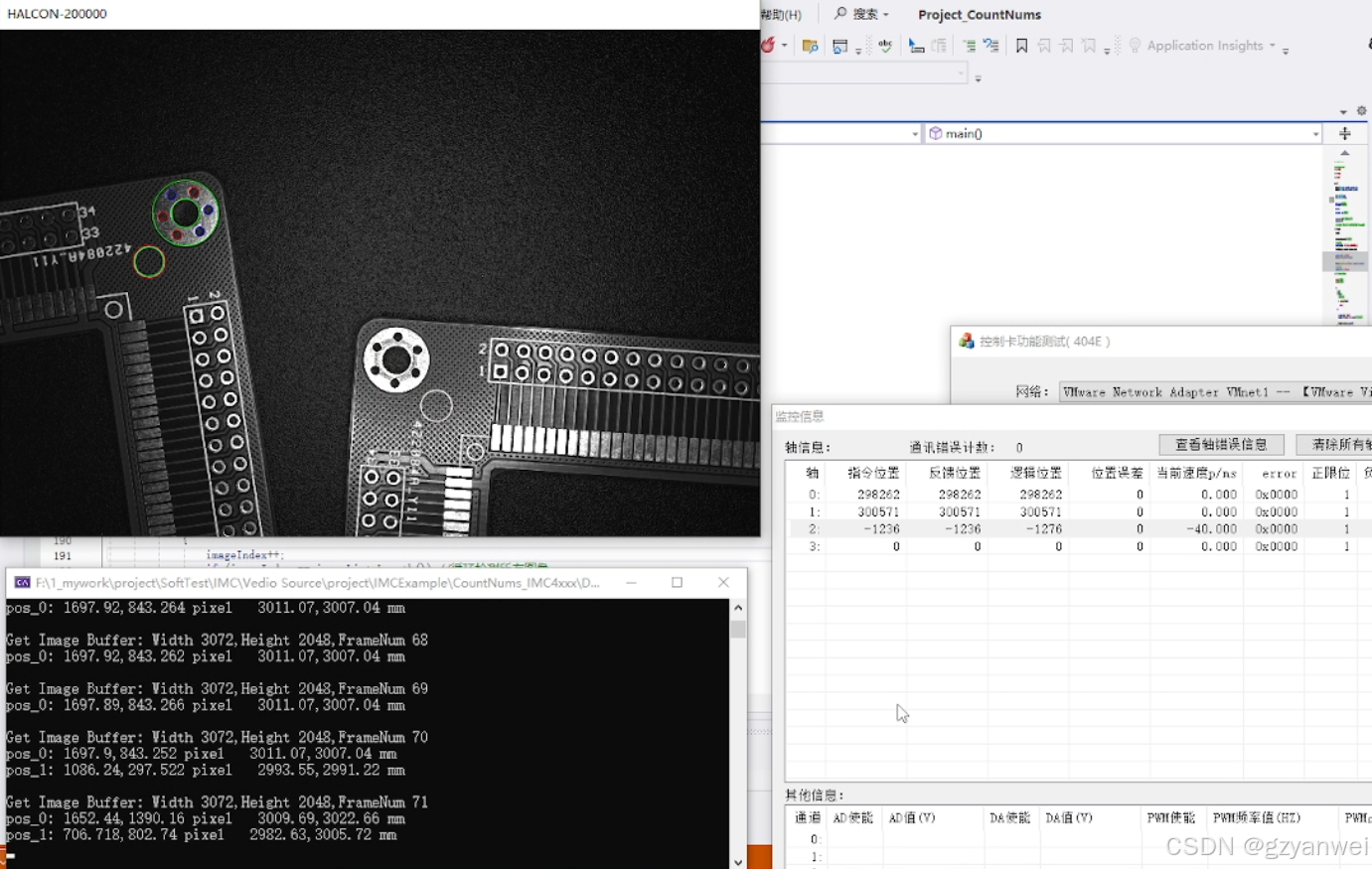
3.1 示例介绍1:工件抓取
示例实现功能:
- 获取当前图像中目标工件数量与目标工件中心点坐标
- 使用控制卡操作轴0、轴1(X轴、Y轴)将工件拾取至指定位置
详细介绍:工件抓取案例讲解
控制卡与机器视觉在示例中参与的部分以功能的形式可以分为:
1.视觉部分功能:
- 相机标定
- 相机获取图像
- 定位目标
- 坐标转换(像素单位转距离单位)
- 显示定位结果
2.控制卡部分功能:
- 连接、配置控制卡
- 用户单位与控制卡单位转换
- 普通插补运动
- 点到点运动
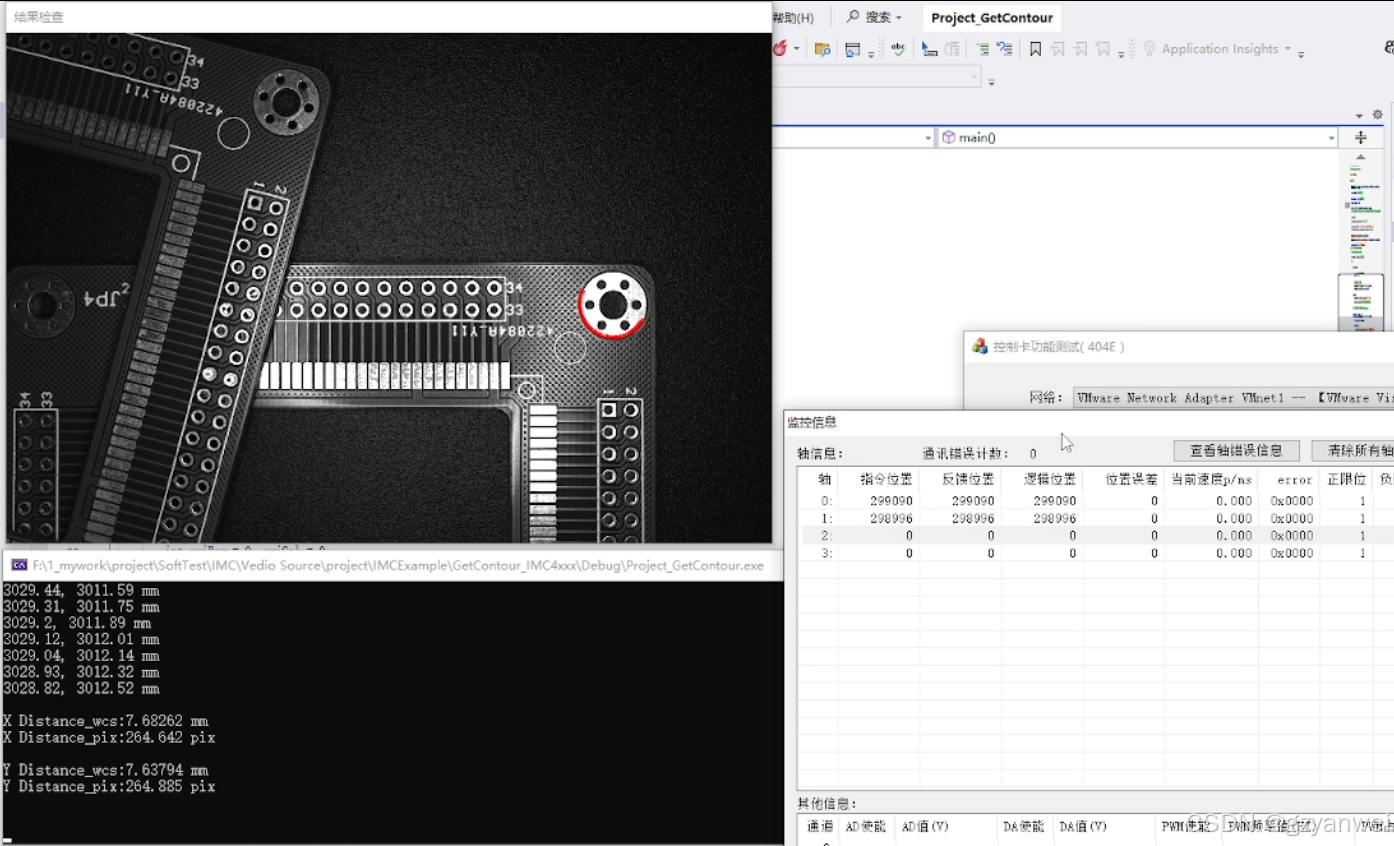
3.2 示例介绍2:轮廓坐标提取
示例实现功能:
- 获取当前图像中目标工件轮廓坐标
- 使用控制卡操作轴0、轴1(X轴、Y轴)绕工件轮廓运动
详细介绍:轮廓提取与运动案例讲解
控制卡与机器视觉在示例中参与的模块以功能的形式可以分为两个部分:
1.视觉部分功能:
- 相机标定
- 相机获取图像
- 定位目标
- 获取轮廓坐标
- 坐标转换(像素单位转距离单位)
- 显示定位结果
2.控制卡部分功能:
- 连接、配置控制卡
- 用户单位与控制卡单位转换
- 普通插补运动

魔乐社区(Modelers.cn) 是一个中立、公益的人工智能社区,提供人工智能工具、模型、数据的托管、展示与应用协同服务,为人工智能开发及爱好者搭建开放的学习交流平台。社区通过理事会方式运作,由全产业链共同建设、共同运营、共同享有,推动国产AI生态繁荣发展。
更多推荐


 16
16 0
0- 0



 已为社区贡献3条内容
已为社区贡献3条内容

所有评论(0)