Matlab 在3D 视觉的应用 01 显示PCD点云
PCD 点云是3D 视觉里面常用的一个三维数据,在Matlab里面有一个通用的展示的函数:pcread,但是这个函数的通用性比较大,所以,要切实玩转PCD格式的点云,还需要动一动实践才行。
前言:
PCD 点云是3D 视觉里面常用的一个三维数据,在Matlab里面有一个通用的展示的函数:pcread,但是这个函数的通用性比较大,所以,要切实玩转PCD格式的点云,还需要动一动实践才行。
1 读取文件:
A = pcread ('test.pcd');
pcshow(A);
读取 PCD 点云的调用方法似乎极其简单,就是上面两个函数,一个读取,一个展示:
然而,当我打开一个正方体的点云数据时候:
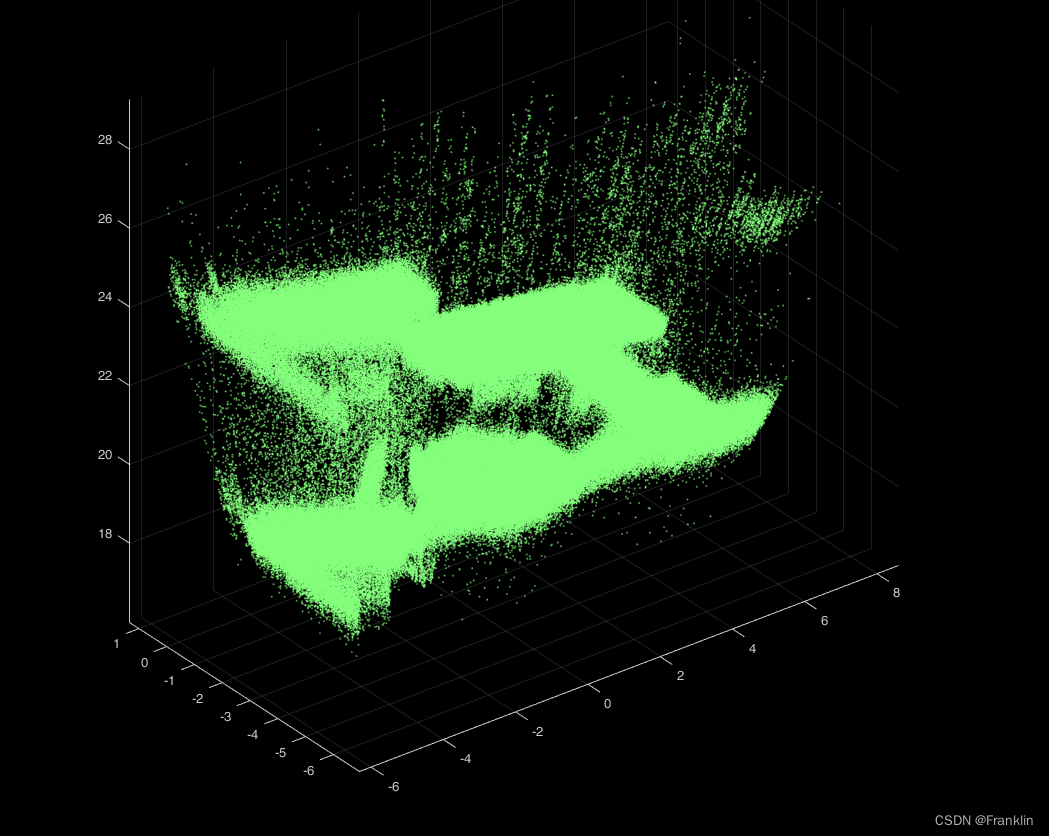
是这个样子的,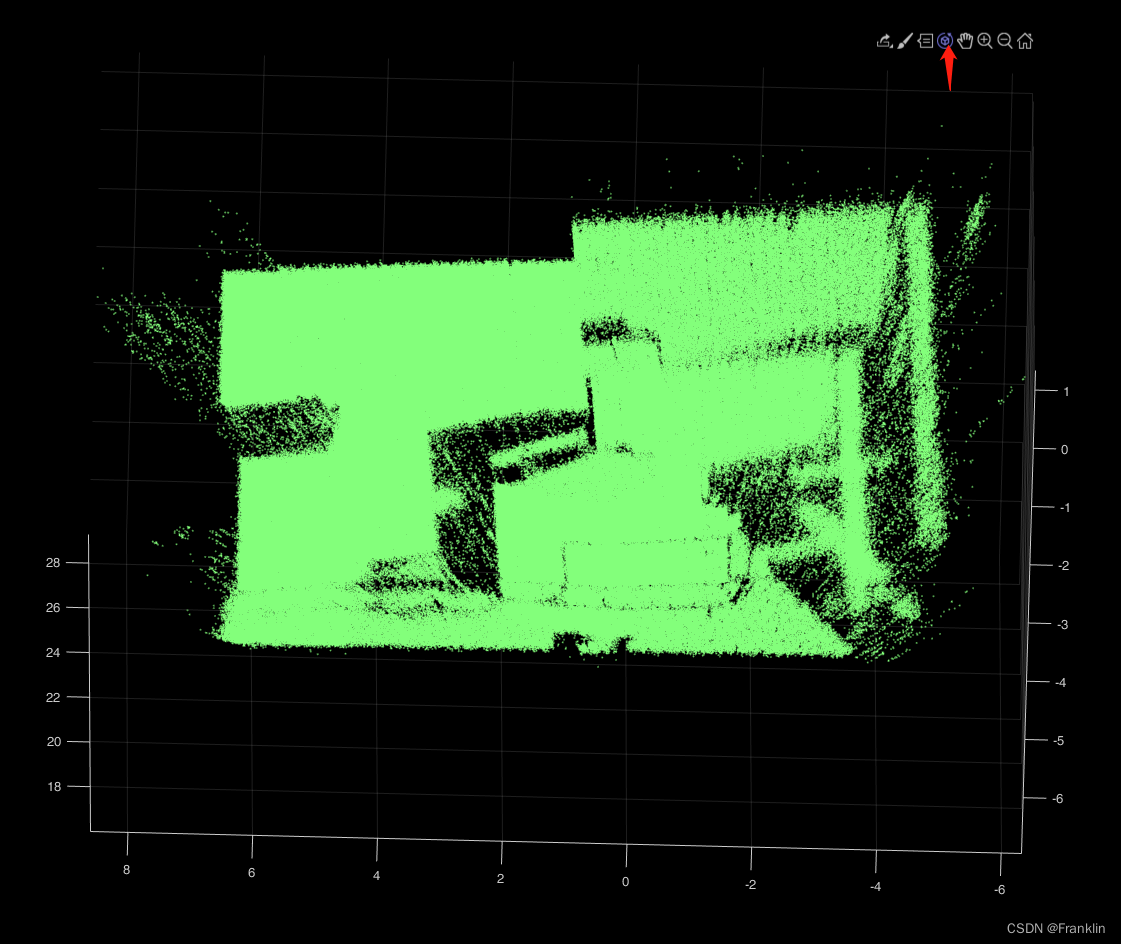
然后,我们选择旋转之后,隐约看到一大团绿的正方体的东西,可是我们的深度信息呢?别急,我们下一节就介绍这个应用的详细了。
2 调整展示
2.1 为啥会出现一团绿:
我们右键看一下:【右键】\ 选择 Colormap Value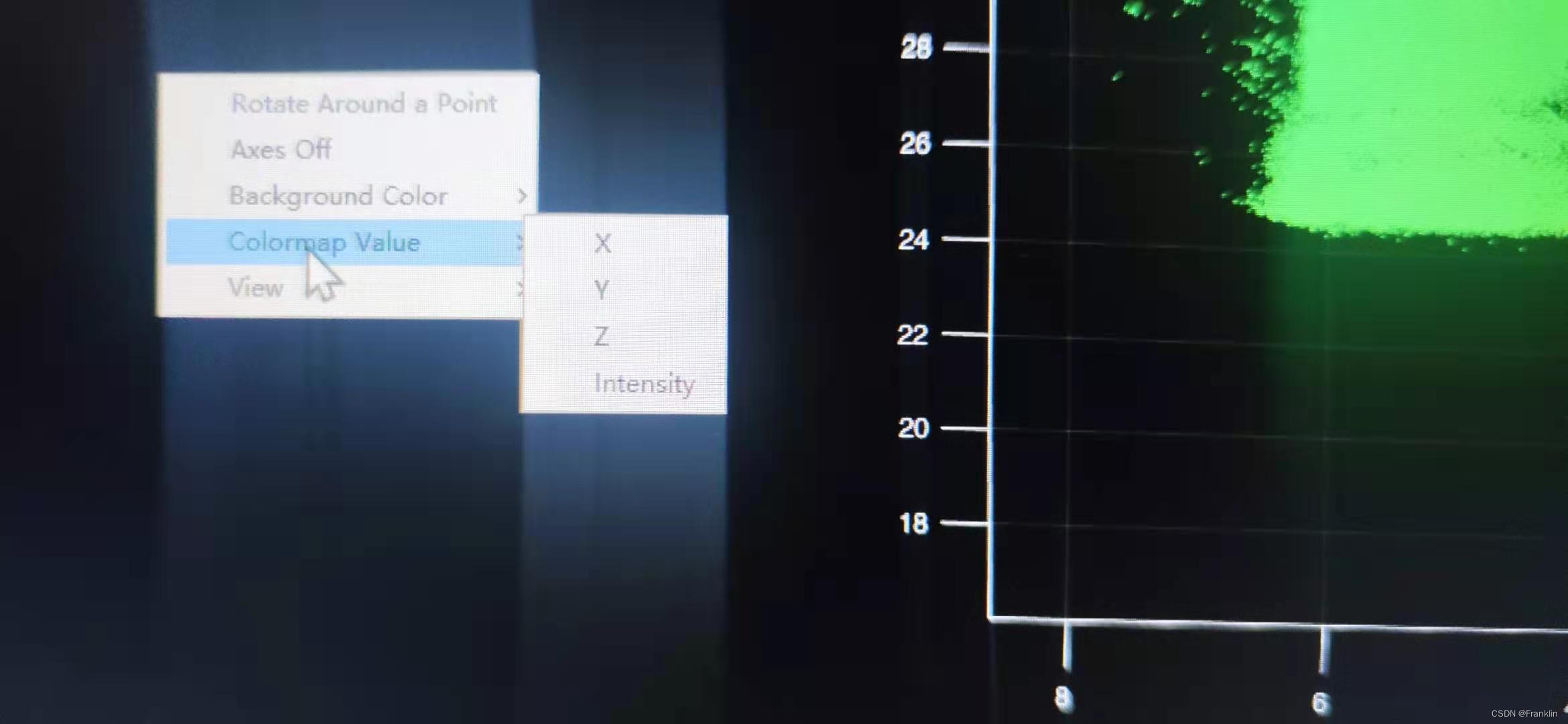
【案,这里由于Matlab默认是用intensity,这时候就是一个颜色了】
2.2 显示深度信息
【右键】\ 选择 Colormap Value \ z
现在我们选择Z,这个选项,就是深度选项,这时候,深度图像的不同颜色的值就显示出来了。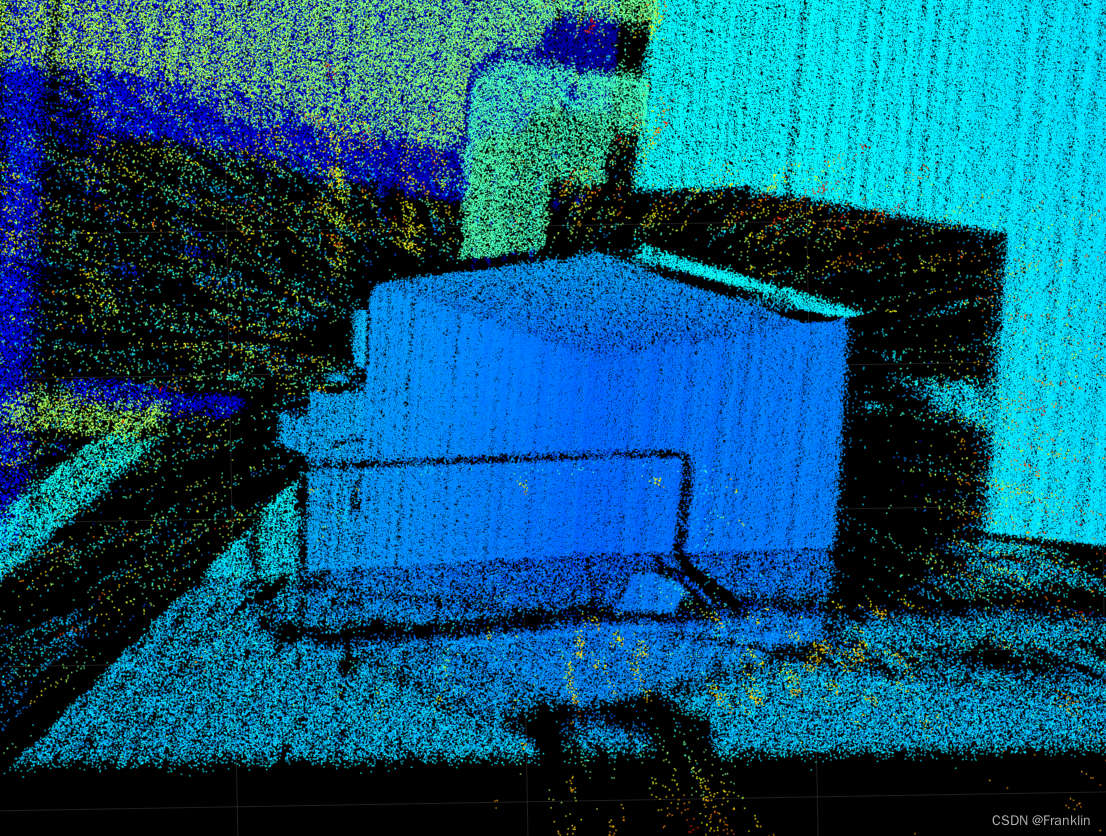
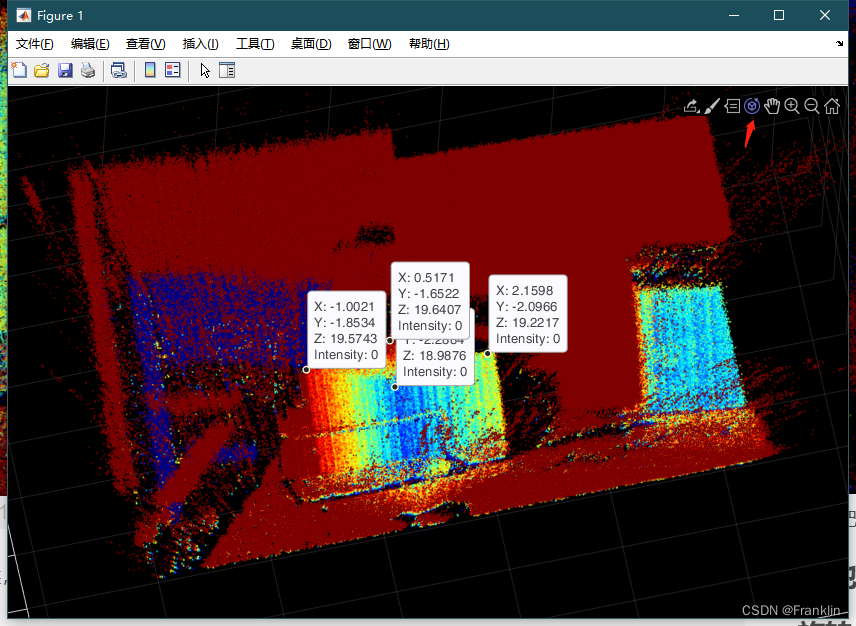
3 调整深度的颜色展示精度
这一点,在做3D检测的时候,尤其有用,如果测量的物体比较薄,用比较大范围的深度颜色去匹配还是比较容易混淆。
那么,我们怎么设定最适合的深度颜色范围内,
如图: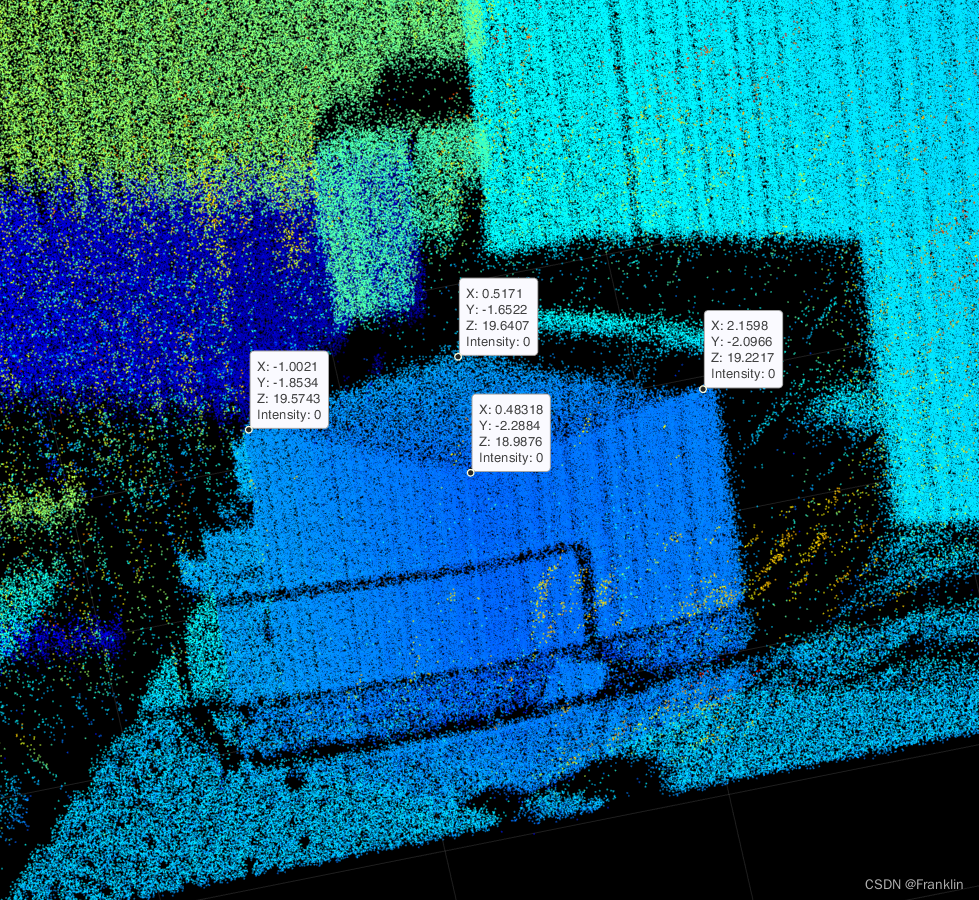
这个例子里面,我们要测量的是一个正方体,那么,这个正方体的深度就是在四个角这里限定了,我们点选图中四个角。
点选的方法,是选择箭头处的位置标注,然后,用右键,选择增加标注点,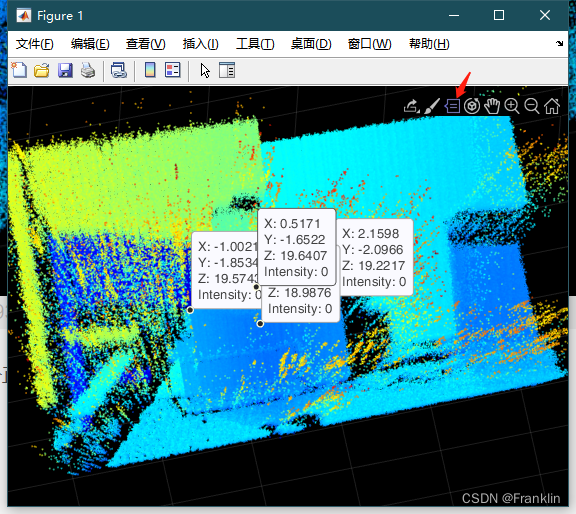
在这个例子里面,方块的深度范围在18.98,到19.64之间:
我们在上方的工具栏里面,选择【编辑\颜色图】
如下图,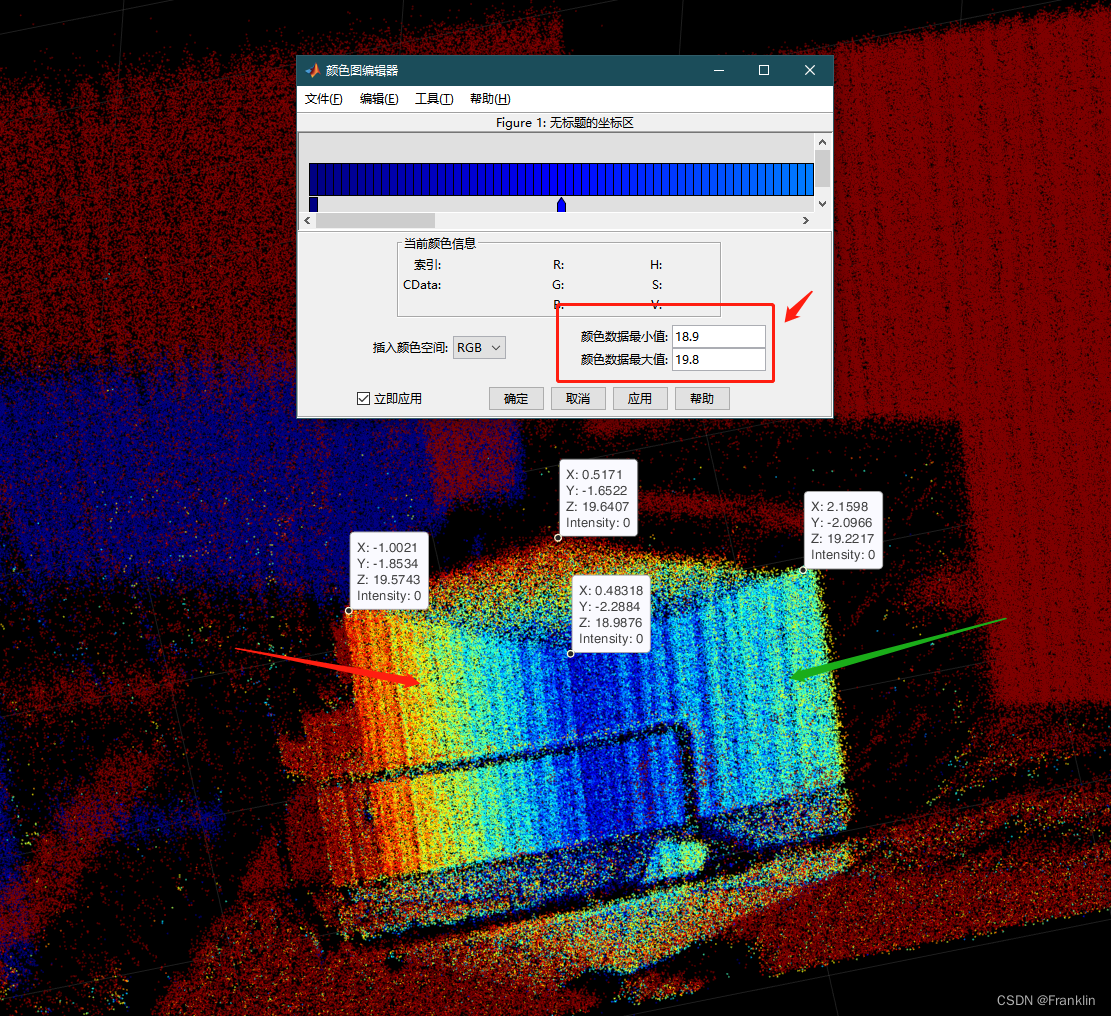
我们把颜色图的范围限定在正方体的深度范围内,这时候,对比之前的深度图,这个时候,正方形内的深度细节就很有层次的反应出来。
其他的几个小技巧
旋转
选择【旋转】功能,然后,拖动鼠标即可
但是, 有时候,选择后,很难恢复到我们之前固定的角度,比如X,Y平面
选择平面
右键【view】\【XY】可以很方便的,把刚才旋转的图像恢复的默认的一个视野。
小结
本章比较详细的介绍了PCD点云在Matlab的展现方法,希望对有需要的读者有帮助。

魔乐社区(Modelers.cn) 是一个中立、公益的人工智能社区,提供人工智能工具、模型、数据的托管、展示与应用协同服务,为人工智能开发及爱好者搭建开放的学习交流平台。社区通过理事会方式运作,由全产业链共同建设、共同运营、共同享有,推动国产AI生态繁荣发展。
更多推荐



 2
2 0
0- 0



 已为社区贡献3条内容
已为社区贡献3条内容

所有评论(0)