视觉SLAM十四讲笔记(ch11)
·
第十一讲 后端2
滑动窗口优化的概念和方法
SLAM系统为了提高精度,会对前端里程计送过来的数据进行BA优化以提高辨识精度。随着系统的运行,后端收到的位姿和路标数量会越来越多,BA优化所需要的时间也会越来越长。为了保证系统的正常运行,就需要对BA的规模进行控制。其中一种有效的办法是滑动窗口法,其主要思想是仅保留离当前时刻最近的N帧进行BA优化。这N帧称为关键帧,其选择方法可以作一些改进。例如它们不仅要时间上比较新,空间上又有一定的间距以免BA结构缩成一团。关键帧的选取应当使得它们与当前帧有较多的共视路标以在BA优化中充分利用路标信息。
滑动窗口法:保留当前时刻最近的N个关键帧,但在滑动过程中,窗口结构发生变化,主要问题在于如何处理新增关键帧和删除关键帧,不同的SLAM框架对该问题具有不同的做法。
位姿图优化
BA过程中,会发现路标点位置在迭代几次后,基本不发生变化,所以可以在优化几次后,不再优化,仅仅将它们当作相机位姿估计的约束。由此,可仅对轨迹进行优化,位姿节点之间的边表示两个相机的相对运动,即位姿图。
位姿图的节点表示相机位姿,边表示两个位姿节点之间的相对运动的估计,该估计可以来自于特征点法或直接法,也可以来自GPS或IMU预积分。
![]() 和
和![]() 之间的一个运动
之间的一个运动![]() :
:
![]()
![]()
最小二乘误差:
![]()
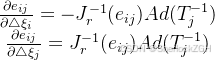
求误差关于![]() 和
和 ![]() 的导数,用到了左扰动:
的导数,用到了左扰动:
![]()
利用到了伴随性质,最后求得:

魔乐社区(Modelers.cn) 是一个中立、公益的人工智能社区,提供人工智能工具、模型、数据的托管、展示与应用协同服务,为人工智能开发及爱好者搭建开放的学习交流平台。社区通过理事会方式运作,由全产业链共同建设、共同运营、共同享有,推动国产AI生态繁荣发展。
更多推荐


 4
4 0
0- 0



 已为社区贡献7条内容
已为社区贡献7条内容

所有评论(0)