视觉SLAM十四讲笔记(ch1-2)
视觉SLAM十四讲笔记(ch1-2)
第一讲 引言
- SLAM:Simultaneous Localization and Mapping
同时定位与地图构建 - 搭载特定传感器主体,在没有环境先验信息的情况下,在运动过程中建立环境的模型,同时估计自己的运动
- 视觉SLAM:以相机作为主要传感器的SLAM
- 从图像中估计相机的运动以及环境的情况
应用:机器人、无人驾驶、AR/VR
视觉SLAM的困难之处:1、三维空间的运动2、受噪声影响3、数据来源只有图像
第二讲 初识SLAM
自主运动两大基本问题
- 定位2、建图
定位侧重对自身进行了解,建图侧重对外在的了解
两大问题相互耦合
精准的定位需要精确的地图
精确的地图来自准确的定位
两类传感器
- 安装于环境中:二维码Marker、GPS、导航、磁条
限制了应用环境,但SLAM强调未知环境,更加重视便携式传感器
- 安装与机器人本体上:IMU、激光、相机
相机(单目、双目、深度、鱼眼、全景等等)
以一定的速率采集图像,形成视频
相机本质是以二维投影的形式记录了三维世界的信息,丢掉了距离维度
- 单目相机没有深度,需要通过Moving View Stereo产生深度
场景和成像具有几何关系,近物的像运动快,远物的像运动慢,可推断距离
- 双目相机通过视差原理计算深度Stereo
通过左右图像的差异判断物体离相机的距离,计算量非常大
- 深度RGBD通过物理方法测量深度
结构光ToF,主动测量功耗大,深度值较准确,但量程小,易受干扰
共同点:1、利用场景和成像几何关系2、三维空间的运动结构3、图像来自连续的视频
视觉SLAM框架
前端:VO,后端:Optimization,回环检测:Loop Closing,建图:Mapping
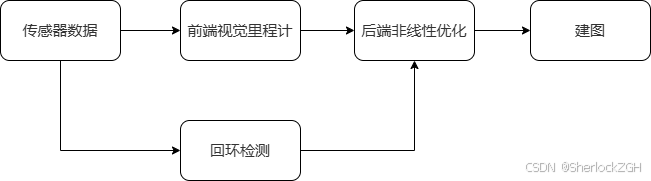
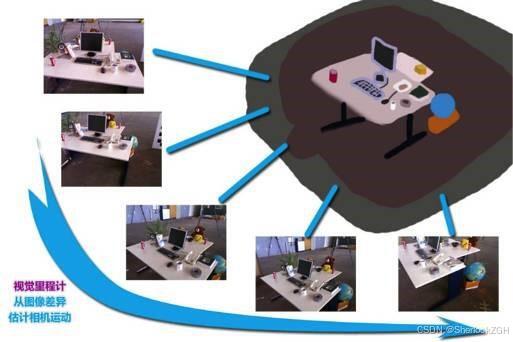
视觉里程计Visual Odometry
相邻图像估计相机运动,通过两张图像计算运动和结构,不可避免地有漂移
方法:特征点法、直接法
后端优化
从带有噪声的数据中优化轨迹和地图状态估计问题,放大后验概率估计MAP,前期以EKF为代表,现在以图优化为代表
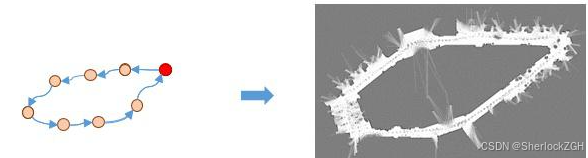
回环检测
有效地检测出相机经过同一个地方
检测机器人是否回到过早先位置、识别到达过的场景、计算图像间的相似性
建图
用于导航、规划、通讯、可视化、交互等
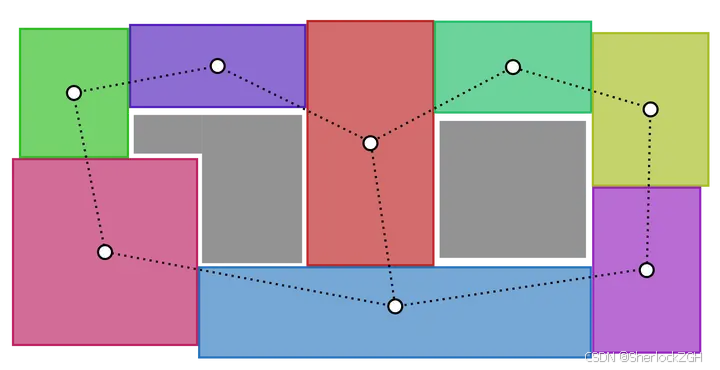
拓扑地图
使用节点和边来表示环境,其中节点表示重要位置(如拐角、门口),边表示这些位置之间的可达路径。拓扑地图注重表示环境的连接关系,而不是具体的几何细节。这种地图表示方法适用于大型、复杂环境中的高效路径规划和导航。个人简单理解为,是一种表示拓扑关系、不存在准确距离信息的地图,例如:我家地图是,客厅在中间,周围连着卧室、书房、厨房、卫生间,书房又连着阳台。
度量地图/尺度地图/几何地图
度量地图(Metric Map)或几何地图(Geometric Map)是SLAM种较为常用的一种表示方法,常见的点云(PointCloud)、八叉树地图(OctoMap)、栅格地图(Grid Map)等都属于度量地图,能够从这个地图中获取具体的尺度信息,例如某个点距离某个点多远、XXX障碍物面积有多大。
根据地图的稠密程度,度量地图还可进一步分为:稀疏地图、稠密地图。稀疏地图例如视觉SLAM建立的特征点地图,是稀疏的,一般多用于自身定位而难以直接导航;而RGBD或LiDAR可以建立稠密地图。
SLAM问题的数学描述
运动和观测:从一点移动到另一点是运动,在某个时刻观测到某个路标是观测。运动方程(定位)和观测方程(建图)
运动方程
观测方程
参考:【SLAM14讲】03 SLAM问题的数学表述

魔乐社区(Modelers.cn) 是一个中立、公益的人工智能社区,提供人工智能工具、模型、数据的托管、展示与应用协同服务,为人工智能开发及爱好者搭建开放的学习交流平台。社区通过理事会方式运作,由全产业链共同建设、共同运营、共同享有,推动国产AI生态繁荣发展。
更多推荐


 25
25 0
0- 0



 已为社区贡献7条内容
已为社区贡献7条内容

所有评论(0)