视觉SLAM十四讲笔记(ch6)
·
第六讲 非线性优化
状态估计问题
SLAM基本方程(运动方程和观测方程):
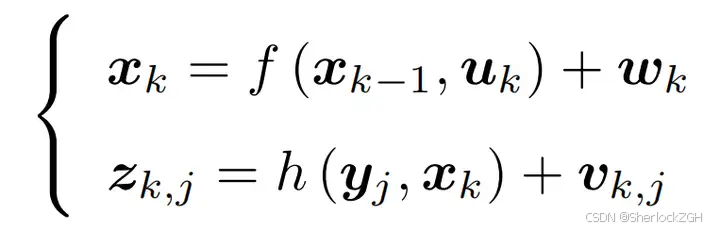
概率学模型来表示SLAM问题:P(x,y|z,u),即已知所有时刻的输入u和观测z,求解x,y的条件概率分布。
P(x,y|z,u)称为后验,使用贝叶斯法则可得

最大后验估计:

最大似然估计:
![]()
把状态最大似然估计转化为最小二乘问题

非线性最小二乘
![]()
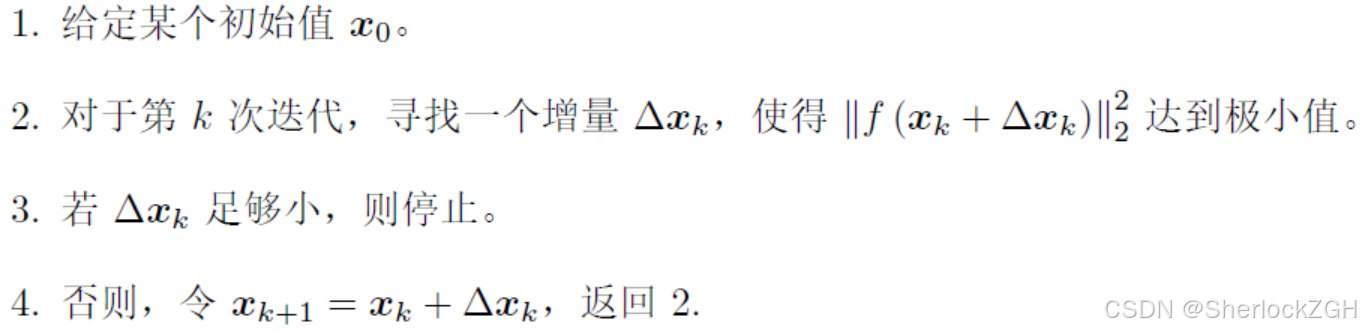
对F(x)求导求极值点,但是这需要知道F(x)的全局性质,使用迭代的方法,问题的核心转化为如何寻找能让F(x)的值不断下降的△ xk
一阶和二阶梯度法
这两种方法并不实用,因为:最速下降法过于贪心,反而容易增加迭代次数,使收敛变慢。牛顿法需要求解海塞矩阵H,但这十分困难。
高斯牛顿法
对f(x)Taylor展开,而不是F(x)。对f(x)一阶Taylor展开,然后再取范数取平方,我们就得到了与F(x)的二阶Taylor近似的式子

求关于△ x的导数,令导数为0
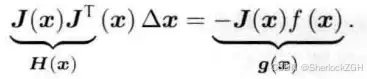
H(x)不是真正的海塞矩阵,而是f(x)的雅克比矩阵J近似出来的海塞矩阵。
高斯牛顿具体步骤:
对于第k次迭代,求出当前的雅可比矩阵J(xk)和误差f(xk)。求解增量方程:H△xk=g.其他步骤与普通迭代法相同。
高斯牛顿法的缺点:需要求解 H−1 ,但是H矩阵可能不可逆,也可能是病态矩阵,导致算法稳定性差。即使可逆也不病态,如果求出来的△x太大,也会使得算法容易发散。
改进版G-N:
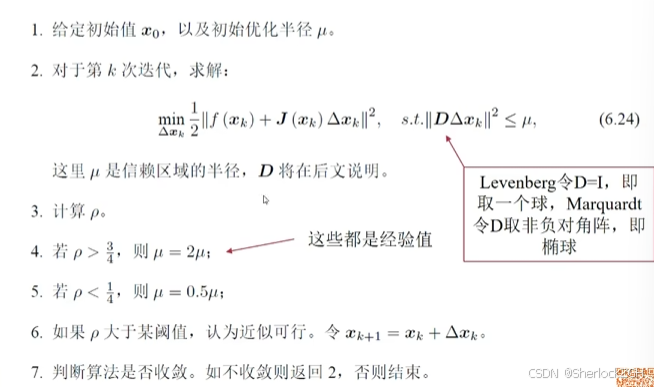
LM方法的具体步骤:


魔乐社区(Modelers.cn) 是一个中立、公益的人工智能社区,提供人工智能工具、模型、数据的托管、展示与应用协同服务,为人工智能开发及爱好者搭建开放的学习交流平台。社区通过理事会方式运作,由全产业链共同建设、共同运营、共同享有,推动国产AI生态繁荣发展。
更多推荐


 20
20 0
0- 0



 已为社区贡献7条内容
已为社区贡献7条内容

所有评论(0)