【ubuntu20.04部署lio-sam算法】
·
ubuntu20.04部署安装lio-sam算法
摘要
本文简介在 Ubuntu 20.04 下以 ROS noetic 为基础安装 GTSAM 并成功编译 LIO-SAM 的适配版本。
安装GTSAM(ros-noetic-gtsam版本)
安装前请检查cmake 和boost版本,Ubuntu 20.04.06自带cmake(>= 3.0) 和libboost-all-dev(>= 1.65)已满足要求。编译LIO-SAM适配版本的其它依赖包也已满足要求(主要是PCL, Eigen和OpenCV等, 详见其CMakeList)。
当前Ubuntu20.04 (focal)下有多种方法可以安装gtsam:
GTSAM官网方法,或可查看其github;
安装Ubuntu 20.04中ROS noetic的gtsam版本(注意区别于后面的3)
sudo apt update
sudo apt search gtsam #将会发现有多个gtsam版本
sudo apt install ros-noetic-gtsam # 目前为 focal,now 4.2.0,,已测试能满足编译LIO-SAM适配版本的要求
安装依赖库
sudo apt-get install -y ros-noetic-navigation
sudo apt-get install -y ros-noetic-robot-localization
sudo apt-get install -y ros-noetic-robot-state-publisher
编译LIO-SAM算法
cd ~/catkin_ws/src
git clone https://github.com/TixiaoShan/LIO-SAM.git
cd …
catkin_make
编译报错
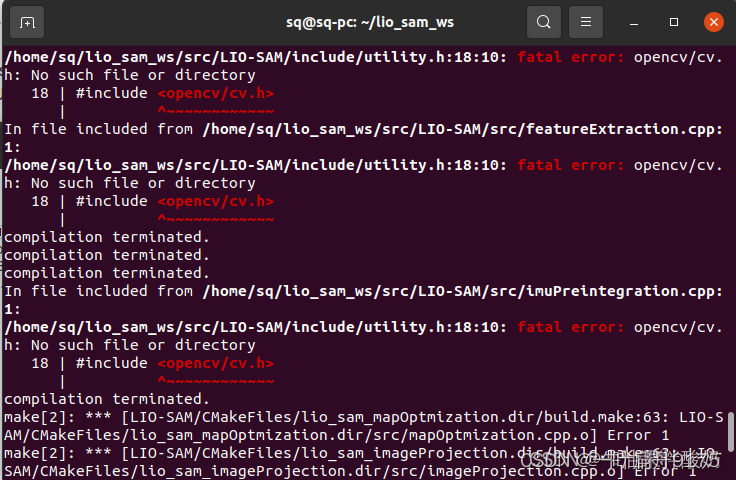
出现此报错是因为版本问题,在使用opencv库时,书写格式做了调整,接下来先对以下两处地方进行修改。
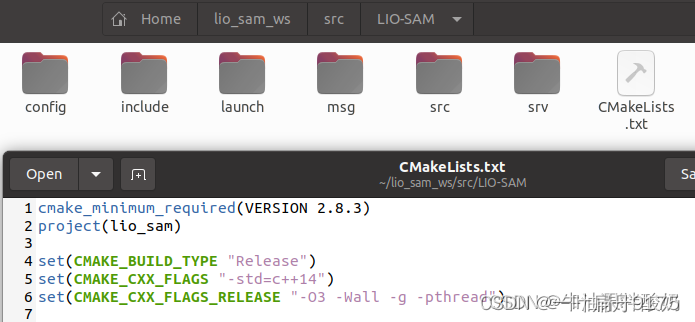
第一处位于lio_sam_ws/src/LIO-SAM目录下,双击打开CMakeLists.txt文件,请将第5行的c++11改为c++14,保存后退出,如下图所示:
第二处位于lio_sam_ws/src/LIO-SAM/include目录下,双击打开utility.h文件,请将第18行的
#include <opencv/cv.h>使用//注释掉
#include <opencv2/opencv.hpp>

魔乐社区(Modelers.cn) 是一个中立、公益的人工智能社区,提供人工智能工具、模型、数据的托管、展示与应用协同服务,为人工智能开发及爱好者搭建开放的学习交流平台。社区通过理事会方式运作,由全产业链共同建设、共同运营、共同享有,推动国产AI生态繁荣发展。
更多推荐


 0
0 0
0- 0



 已为社区贡献3条内容
已为社区贡献3条内容

所有评论(0)