ROS2 架构梳理汇总整理
本篇文章用来记录和梳理ROS2开发者及个人学习过程中对架构的理解,通过思维导图,分层架构图,逻辑流程图等说明。后续该文章会持续更新,将之前文章中所提到Nodes、Interfaces、Topics、Services、Actions、Parameters、Launch等补充到本文,使整体链接起来。
·
文章目录
前言
本篇文章用来记录和梳理ROS2开发者及个人学习过程中对架构的理解,通过思维导图,分层架构图,逻辑流程图等说明。
正文
机器人平台整体架构(ROS2)
图一、个人理解整体架构
整体分为三个部分,分别是:
- ROS2:机器人操作系统核心框架
- ROS2 Control:硬件控制与执行框架
- MoveIt2:运动规划与高级控制层
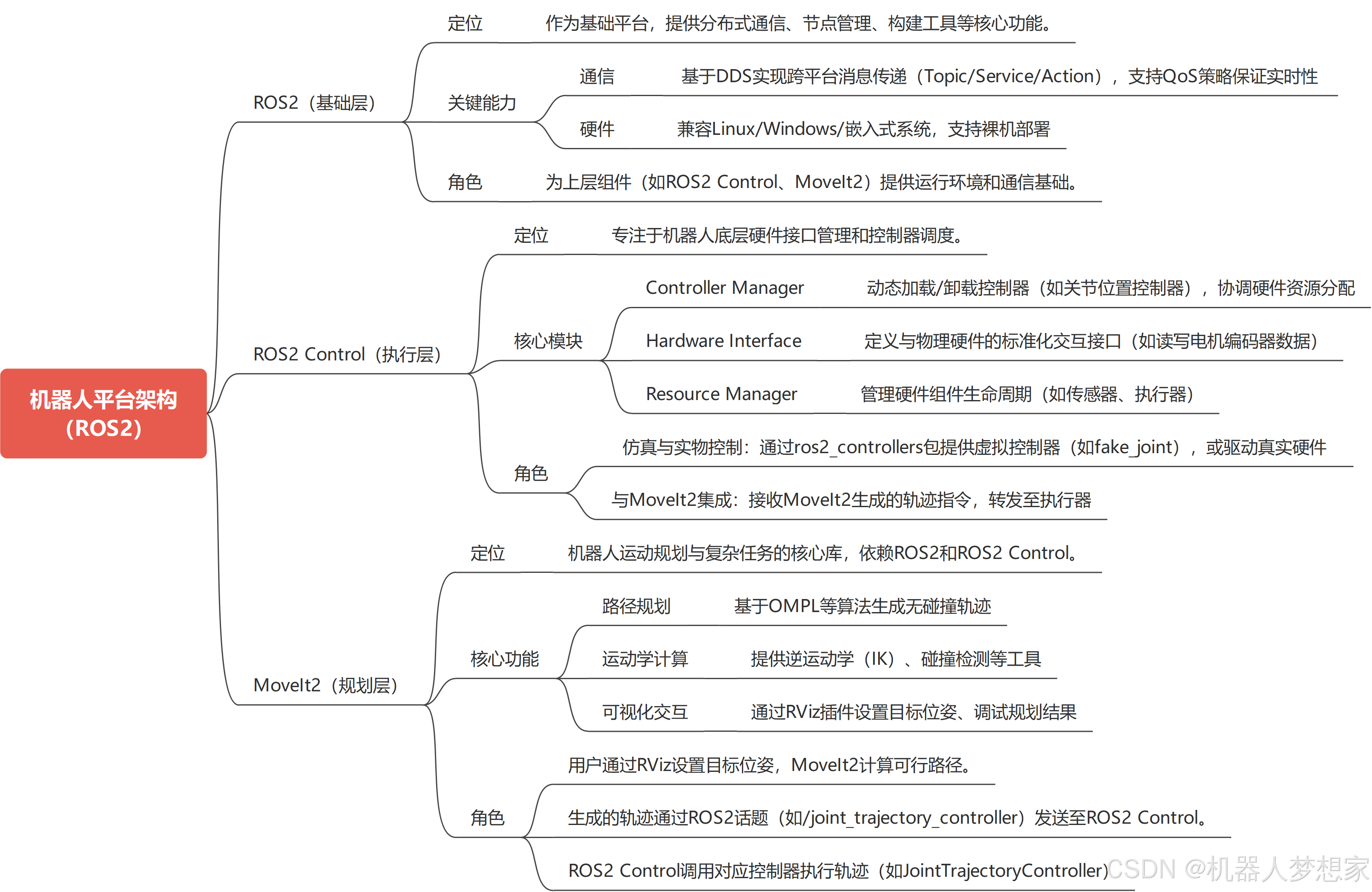
三者协作关系总结
| 层级 | 组件 | 输入/输出 | 典型交互场景 |
|---|---|---|---|
| 基础层 | ROS2 | 提供通信接口、节点生命周期管理 | MoveIt2与ROS2 Control通过Topic通信 |
| 执行层 | ROS2 Control | 接收轨迹指令,管理硬件接口 | 将MoveIt2的规划结果发送至电机控制器 |
| 规划层 | MoveIt2 | 生成运动轨迹,处理环境感知与避障 | 调用ROS2 Control接口验证轨迹可行性 |
ROS2架构
图一、个人理解ROS2整体架构
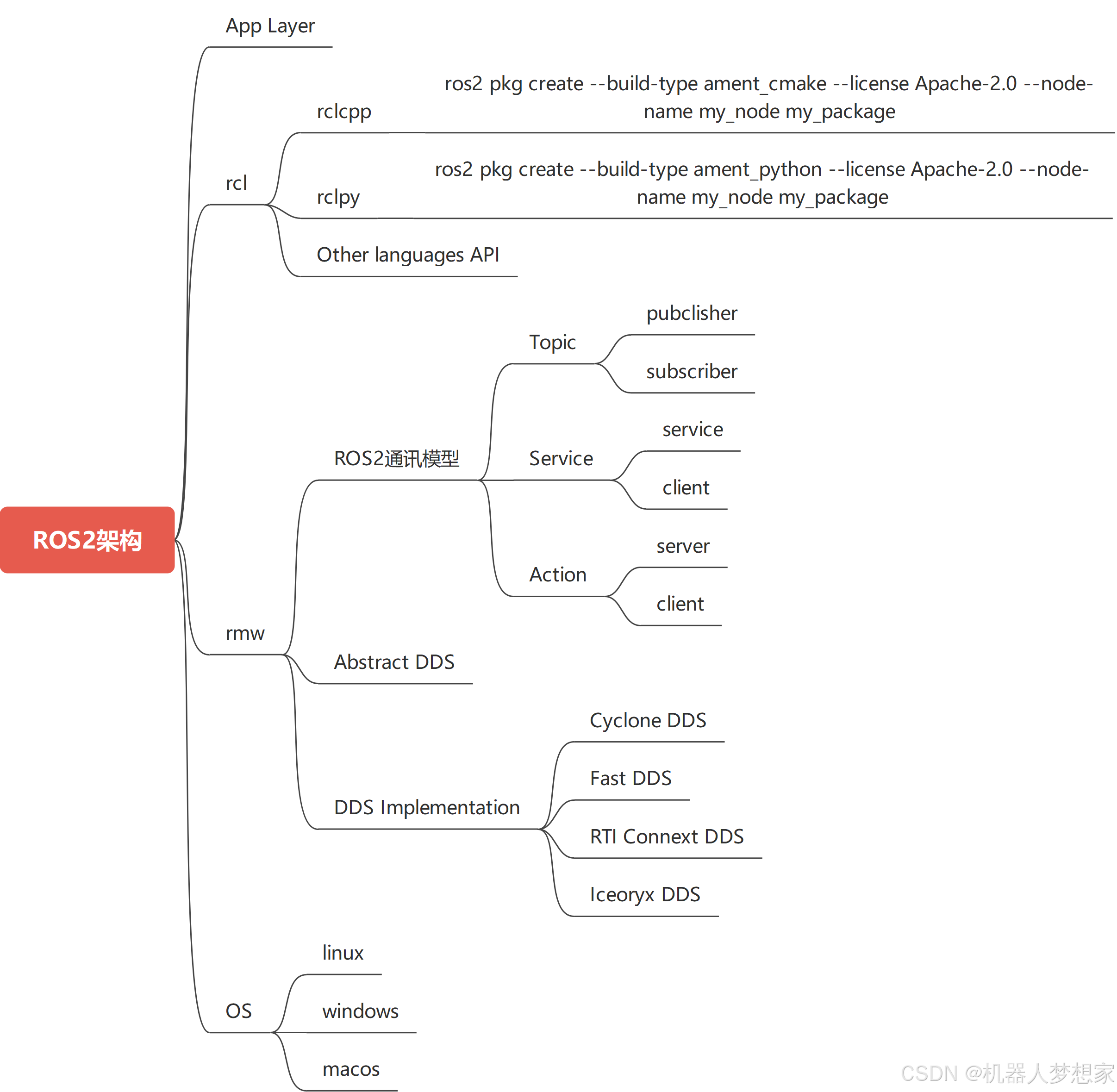
图二、开发者整理ROS2整体架构
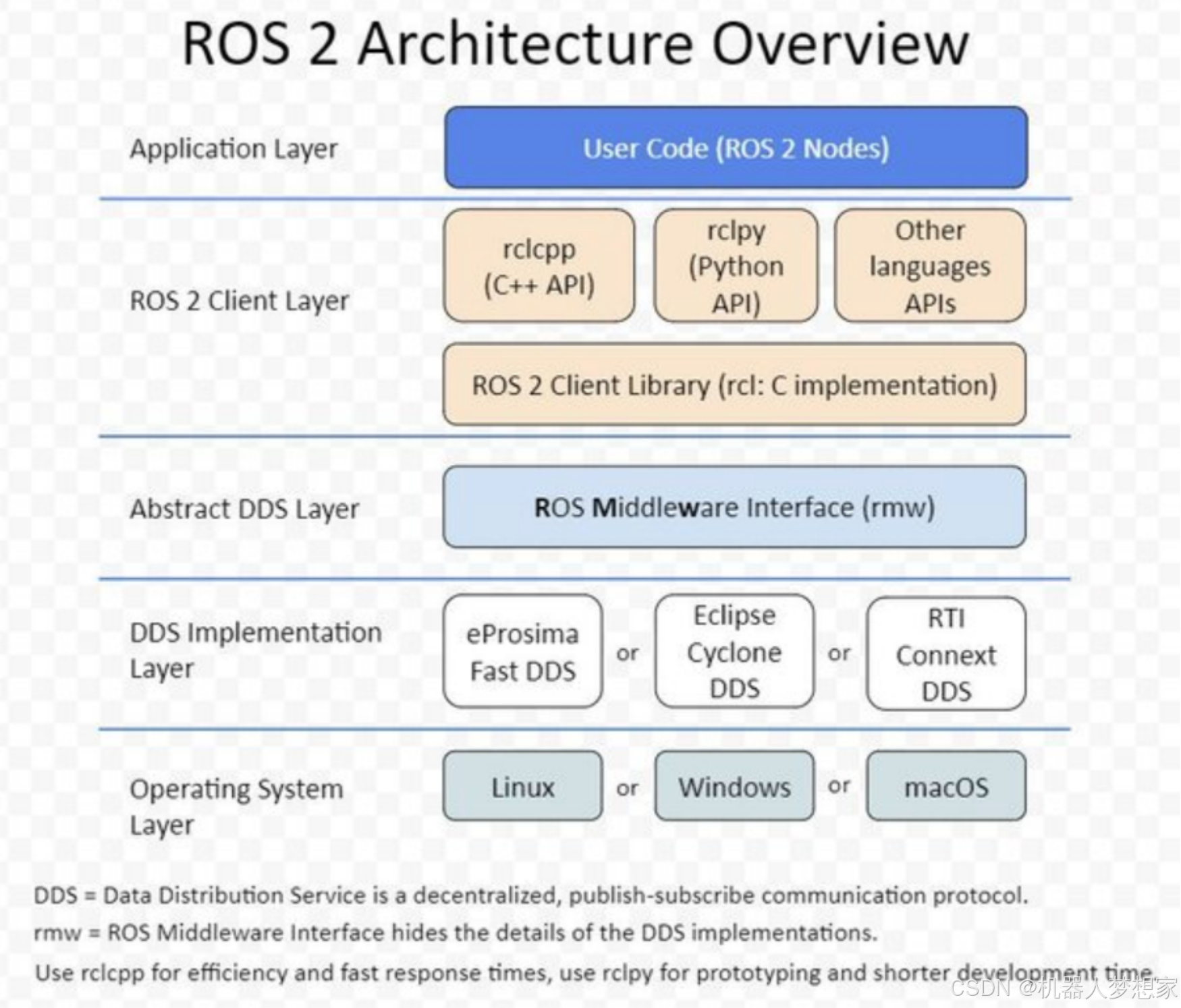
图三、Intel整理ROS2整体架构
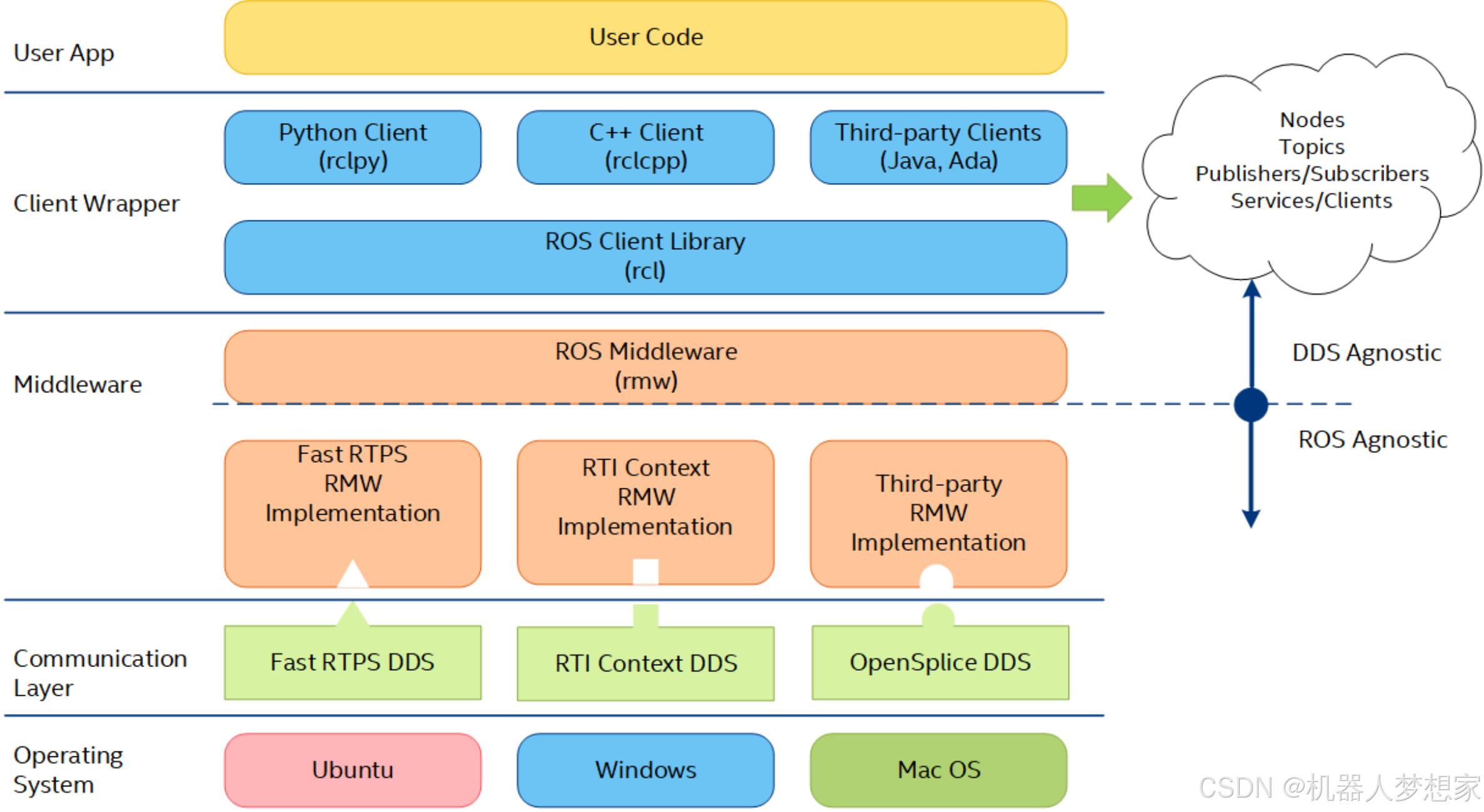
图四、DDS具体架构说明

ROS2 Control架构
ROS2 Control分为下边几个核心模块:
- Controller Manager:动态加载/卸载控制器(如关节位置控制器),协调硬件资源分配
- Resource Manager:管理硬件组件生命周期(如传感器、执行器)
也可以参考博主之前写的这篇文章——《ROS2 Control分析讲解-CSDN博客》
图一、官方整整理ROS2 Control整体架构

总结
后续该文章会持续更新,将之前文章中所提到Nodes、Interfaces、Topics、Services、Actions、Parameters、Launch等补充到本文,使整体链接起来。
如果觉得这篇文章启发到了你,动动小手给博主点个赞、点个关注就更棒啦!!!

魔乐社区(Modelers.cn) 是一个中立、公益的人工智能社区,提供人工智能工具、模型、数据的托管、展示与应用协同服务,为人工智能开发及爱好者搭建开放的学习交流平台。社区通过理事会方式运作,由全产业链共同建设、共同运营、共同享有,推动国产AI生态繁荣发展。
更多推荐



 9
9 0
0- 0



 已为社区贡献2条内容
已为社区贡献2条内容

所有评论(0)