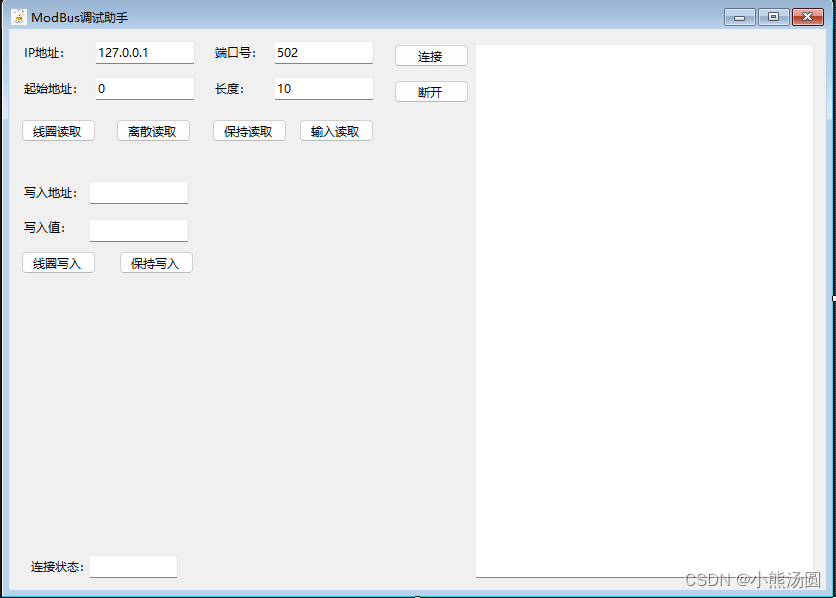
ModBus调试助手(c#版本)
using EasyModbus;
using System;
namespace ModbusTCP
{
public partial class ModBus调试助手 : Form
{
public ModBus调试助手()
{
InitializeComponent();
}
private void Form1_Load(object sender, EventArgs e)
{}
ModbusClient modbusClient;
//连接按钮
private void connect_Click(object sender, EventArgs e)
{
try
{
if (ipText.Text == "")
{
MessageBox.Show("IP地址不能为空");
}
else
{
modbusClient = new ModbusClient(ipText.Text, int.Parse(port.Text));
modbusClient.Connect();
state.Text = "连接成功";
}
}
catch (Exception ex)
{
MessageBox.Show(ex.Message);
}
}
//线圈读取按钮
private void coilRead_Click(object sender, EventArgs e)
{
try
{
data.Clear();
bool[] b = modbusClient.ReadCoils(Convert.ToInt32(startAdress.Text), Convert.ToInt32(length.Text));
for (int i = 0; i < b.Length; i++)
{
data.AppendText(b[i].ToString() + "\r\n");
}
}
catch(Exception ex)
{
MessageBox.Show(ex.Message);
}
}
//离散读取按钮
private void discreteRead_Click(object sender, EventArgs e)
{
try
{
data.Clear();
bool[] b = modbusClient.ReadDiscreteInputs(Convert.ToInt32(startAdress.Text), Convert.ToInt32(length.Text));
for (int i = 0; i < b.Length; i++)
{
data.AppendText(b[i].ToString() + "\r\n");
}}
catch (Exception ex)
{
MessageBox.Show(ex.Message);
}
}//保持寄存器写入按钮
private void writeIn_Click(object sender, EventArgs e)
{
try
{
int address = Convert.ToInt32(writeAddress.Text);
int number = Convert.ToInt32(writeNumber.Text);
modbusClient.WriteSingleRegister(address,number);
}
catch (Exception ex)
{
MessageBox.Show(ex.Message);
}
}//线圈写入
private void coilWriteIn_Click(object sender, EventArgs e)
{
try
{
int address = Convert.ToInt32(writeAddress.Text);
bool number = Convert.ToBoolean(Convert.ToInt32(writeNumber.Text));
modbusClient.WriteSingleCoil(address, number);
}
catch (Exception ex)
{
MessageBox.Show(ex.Message);
}
}//保持寄存器读取按钮
private void keepRead_Click(object sender, EventArgs e)
{
try
{
data.Clear();
int[] readHoldingRegisters = modbusClient.ReadHoldingRegisters(int.Parse(startAdress.Text), int.Parse(length.Text));
for (int i = 0; i < readHoldingRegisters.Length; i++)
{
data.AppendText(readHoldingRegisters[i].ToString() + "\r\n");
}
}
catch (Exception ex)
{
MessageBox.Show(ex.Message);
}
}
//输入寄存器读取按钮
private void InputRead_Click(object sender, EventArgs e)
{try
{
data.Clear();
int[] b = modbusClient.ReadInputRegisters(Convert.ToInt32(startAdress.Text), Convert.ToInt32(length.Text));
for (int i = 0; i < b.Length; i++)
{
data.AppendText(b[i].ToString() + "\r\n");
}}
catch (Exception ex)
{
MessageBox.Show(ex.Message);
}
}
//断开连接
private void disconnect_Click(object sender, EventArgs e)
{
modbusClient.Disconnect();
state.Text = "连接断开";}
}
}

魔乐社区(Modelers.cn) 是一个中立、公益的人工智能社区,提供人工智能工具、模型、数据的托管、展示与应用协同服务,为人工智能开发及爱好者搭建开放的学习交流平台。社区通过理事会方式运作,由全产业链共同建设、共同运营、共同享有,推动国产AI生态繁荣发展。
更多推荐


 0
0 0
0- 0



 已为社区贡献3条内容
已为社区贡献3条内容

所有评论(0)