工程(四)——Kitti转bag跑Lego-LOAM
·
1、下载KITTI RAW数据集
链接:https://pan.baidu.com/s/1kjHSec1N9jAnvSWE9wHwPQ
提取码:87j4
2、安装转bag软件
pip install kitti2bag
需要更改kitti2bag点云的强度信息,不然会出现如下情况
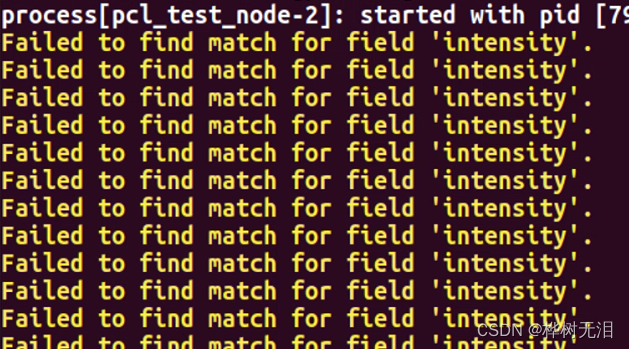
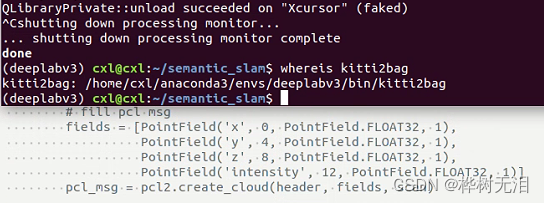
whereis kitti2bag
将i改为intensity

kitti2bag -t 2011_10_03 -r 0027 raw_synced
rosbag play kitti_2011_10_03_drive_0027_synced.bag
3、数据可视化
- RVIZ显示
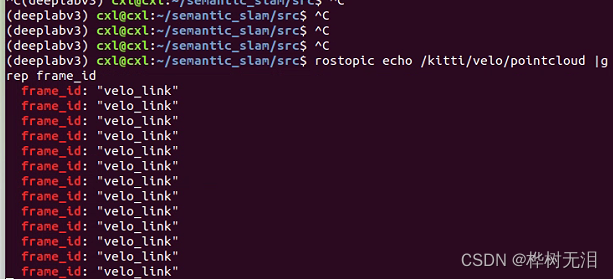
获取frame_id
rostopic list
rostopic echo /topic |grep frame_id
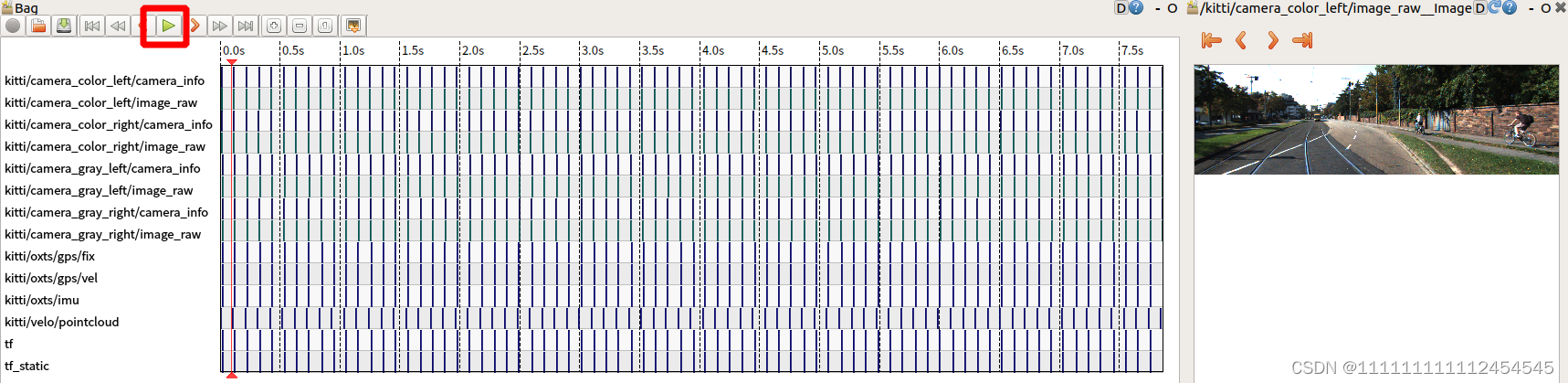
- RQT显示
rqt_bag kitti_2011_09_26_drive_0002_synced.bag
4、修改lego_loam代码
extern const int N_SCAN = 64;
extern const int Horizon_SCAN = 1800;
extern const float ang_res_x = 0.2;
extern const float ang_res_y = 0.427;
extern const float ang_bottom = 24.9;
extern const int groundScanInd = 30;
roslaunch lego_loam run.launch
rosbag play *.bag --clock 5、EV
GitHub - MichaelGrupp/evo: Python package for the evaluation of odometry and SLAM


魔乐社区(Modelers.cn) 是一个中立、公益的人工智能社区,提供人工智能工具、模型、数据的托管、展示与应用协同服务,为人工智能开发及爱好者搭建开放的学习交流平台。社区通过理事会方式运作,由全产业链共同建设、共同运营、共同享有,推动国产AI生态繁荣发展。
更多推荐


 1
1 0
0- 0



 已为社区贡献6条内容
已为社区贡献6条内容

所有评论(0)